#include <planners/atace/PL_PRM_Constrained.h>
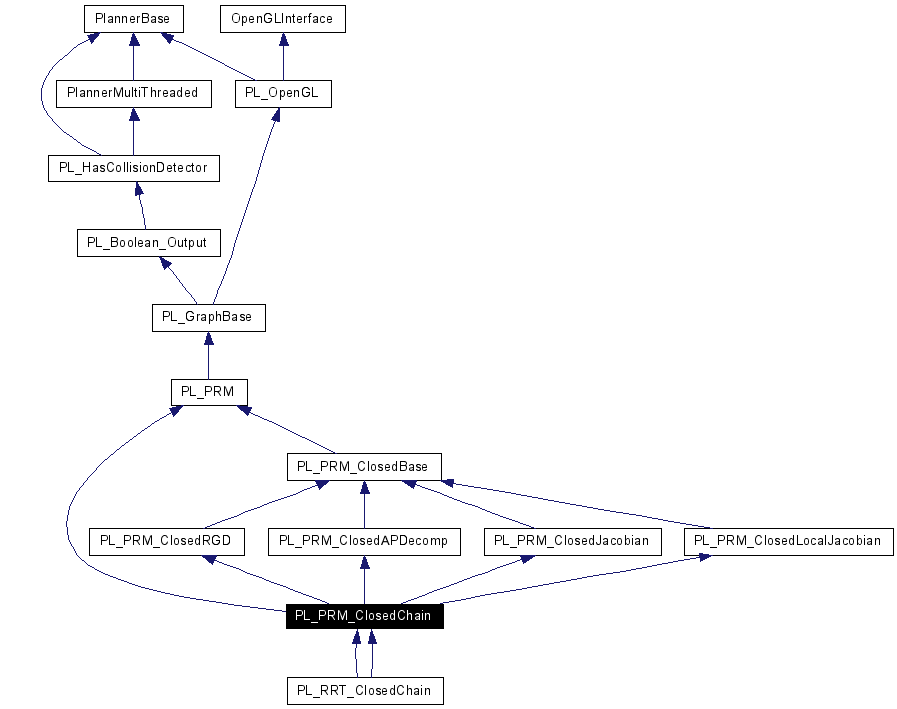
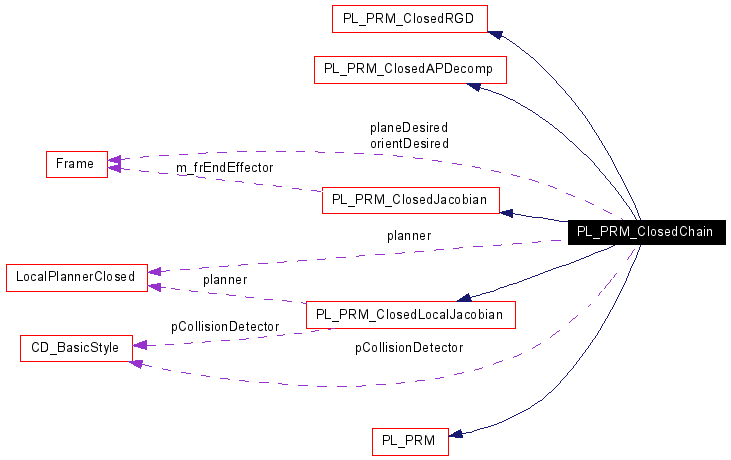
Inherits PL_PRM_ClosedRGD, PL_PRM_ClosedAPDecomp, PL_PRM_ClosedJacobian, PL_PRM_ClosedLocalJacobian, and PL_PRM.
Inherited by PL_RRT_ClosedChain, and PL_RRT_ClosedChain.
Inheritance diagram for PL_PRM_ClosedChain:
Definition at line 30 of file PL_PRM_Constrained.h.
|
|
Definition at line 23 of file PL_PRM_Constrained.cpp. References edgeFrag, edgePath, PL_GraphBase::G, pCollisionDetector, planner, useGoalPose, useJacobian, useOrientConstraint, and usePlanarConstraint. |
|
|
Definition at line 37 of file PL_PRM_Constrained.cpp. References edgeFrag, pCollisionDetector, and planner. |
|
|
|
|
|
|
|
||||||||||||
|
Reimplemented from PL_PRM. Definition at line 522 of file PL_PRM_Constrained.cpp. References PL_PRM::baseConnectID, PL_PRM::config_seeds, PL_PRM::connectIDp, PL_GraphBase::Distance(), PL_PRM::edgeChecked, edgeFrag, edgePath, PL_GraphBase::G, PL_GraphBase::GetMidPoint(), IsInterfering(), PL_GraphBase::NIL_ID, PL_PRM::NodeInConnectionList(), TRUE, and PL_PRM::useMidPts. Here is the call graph for this function: 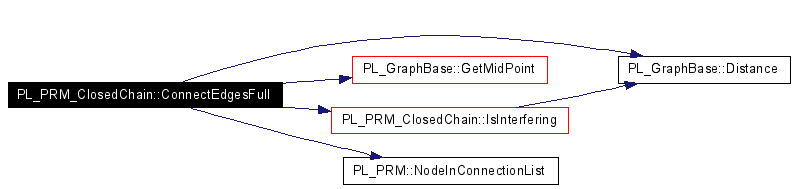 |
|
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 913 of file PL_PRM_Constrained.cpp. References Error3(), GetRotAngles(), GetToolFrame(), Frame::GetTranslationVector(), Vector4::Magnitude(), orientDesired, useOrientConstraint, and usePlanarConstraint. Referenced by GetClosedConfiguration(), IsClosed(), and MakeItClosed(). Here is the call graph for this function: 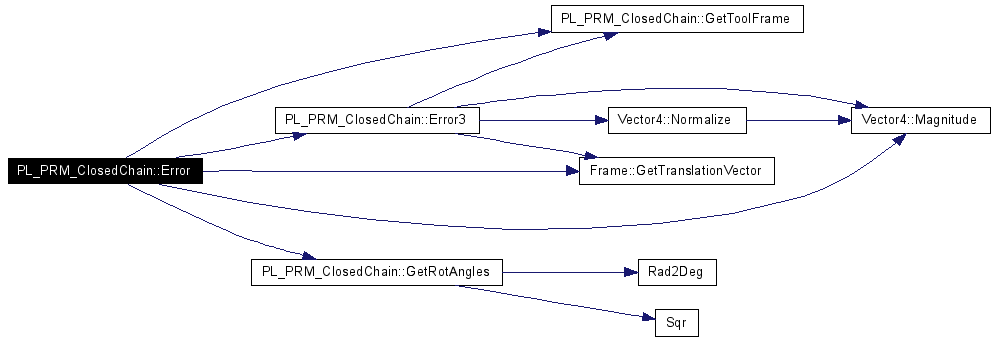 |
|
||||||||||||
|
* Definition at line 799 of file PL_PRM_Constrained.cpp. References GetToolFrame(), Frame::GetTranslationVector(), Vector4::Magnitude(), Vector4::MagSquared(), PX, PY, PZ, and useOrientConstraint. Referenced by GenerateRandomConfigForPose(). Here is the call graph for this function: 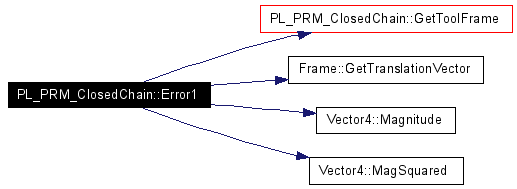 |
|
||||||||||||
|
Definition at line 850 of file PL_PRM_Constrained.cpp. References GetToolFrame(), Frame::GetTranslationVector(), and Vector4::Magnitude(). Referenced by GenerateRandomConfig(). Here is the call graph for this function: 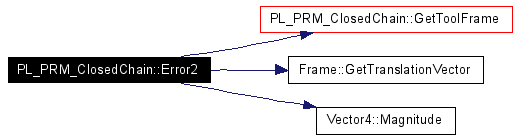 |
|
||||||||||||
|
Definition at line 859 of file PL_PRM_Constrained.cpp. References GetToolFrame(), Frame::GetTranslationVector(), Vector4::Magnitude(), and Vector4::Normalize(). Referenced by Error(), and GenerateRandomConfig(). Here is the call graph for this function: 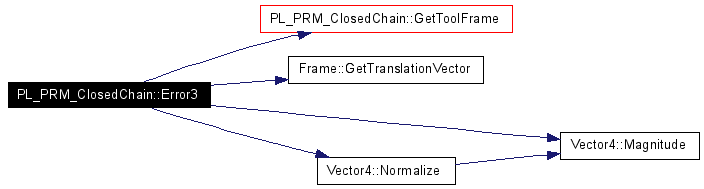 |
|
||||||||||||
|
Definition at line 902 of file PL_PRM_Constrained.cpp. References GetRotAngles(), and GetToolFrame(). Referenced by GenerateRandomConfig(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 498 of file PL_PRM_Constrained.cpp. References costFunc, Error2(), Error3(), Error4(), PL_GraphBase::GenerateRandomConfig(), GetSatisfactoryConfiguration(), orientDesired, planeDesired, useOrientConstraint, and usePlanarConstraint. Here is the call graph for this function: 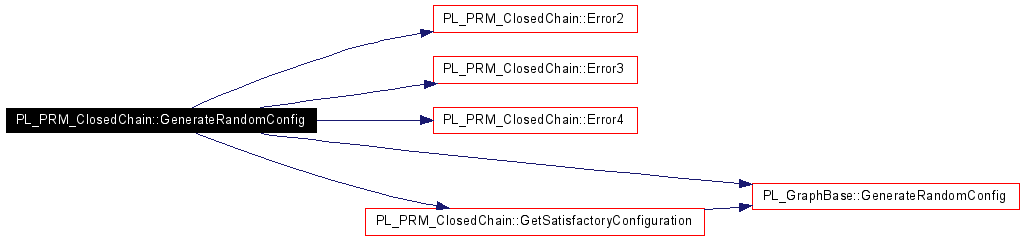 |
|
|
Definition at line 473 of file PL_PRM_Constrained.cpp. References costFunc, Error2(), Error3(), Error4(), PL_GraphBase::GenerateRandomConfig(), GetSatisfactoryConfiguration(), orientDesired, planeDesired, useOrientConstraint, and usePlanarConstraint. Referenced by PL_RRT_ClosedChain::CompareJacobianAndRGD(), PL_RRT_ClosedChain::CompareLocalPlanners(), and PL_RRT_ClosedChain::Plan(). Here is the call graph for this function: 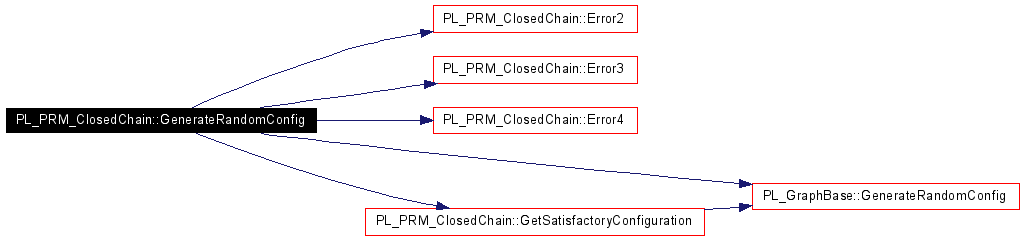 |
|
||||||||||||
|
Definition at line 460 of file PL_PRM_Constrained.cpp. References costFunc, Error1(), PL_GraphBase::GenerateRandomConfig(), GetSatisfactoryConfiguration(), and IsInterfering(). Referenced by PL_RRT_ClosedChain::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoal2(), and Plan(). Here is the call graph for this function:  |
|
|
Definition at line 143 of file PL_PRM_ClosedChain.h. |
|
|
Definition at line 429 of file PL_PRM_Constrained.cpp. References DEF_ERR_TOLERANCE, DEF_NEIGHBOR, Error(), PL_GraphBase::GenerateRandomConfig(), MAX_ITERATION, MAX_RETRY, UpdateOrientConstraint(), and UpdatePlanarConstraint(). Referenced by PL_RRT_ClosedChain::Extend(). Here is the call graph for this function: 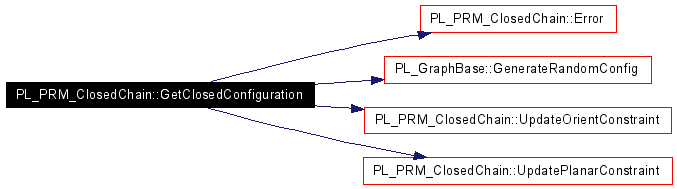 |
|
||||||||||||||||||||
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 942 of file PL_PRM_Constrained.cpp. References Rad2Deg(), and Sqr(). Referenced by Error(), and Error4(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 397 of file PL_PRM_Constrained.cpp. References costFunc, DEF_ERR_TOLERANCE, DEF_NEIGHBOR, PL_GraphBase::GenerateRandomConfig(), PlannerBase::HasTimeLimitExpired(), MAX_ITERATION, and MAX_RETRY. Referenced by GenerateRandomConfig(), and GenerateRandomConfigForPose(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 188 of file PL_PRM_Constrained.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), CD_BasicStyle::GetFrameManager(), FrameManager::GetFrameRef(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), FrameManager::GetTransformRelative(), FrameManager::GetWorldFrame(), CD_BasicStyle::JointFrameNum(), and CD_BasicStyle::SetConfiguration(). Referenced by PL_RRT_ClosedChain::AdjustConfiguration(), PL_RRT_ClosedChain::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoal2(), Error(), Error1(), Error2(), Error3(), Error4(), Plan(), and UpdatePlanarConstraint(). Here is the call graph for this function: 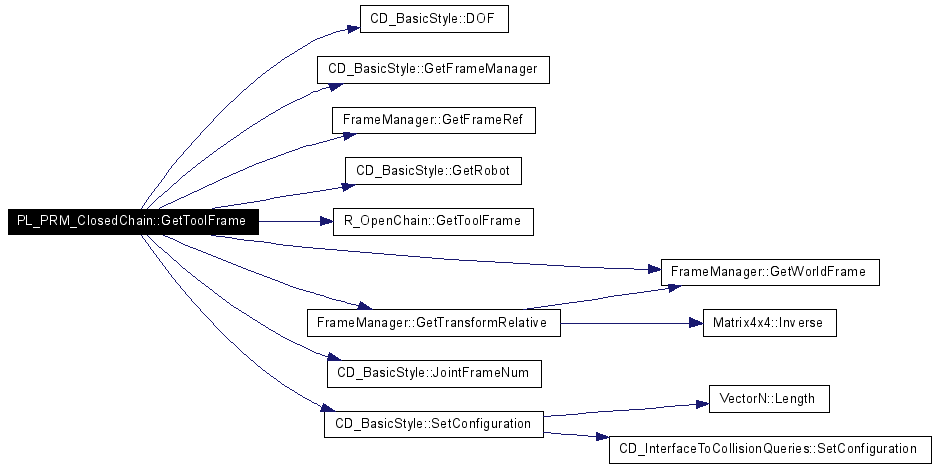 |
|
|
Definition at line 47 of file PL_PRM_Constrained.h. References FALSE, TRUE, and useGoalPose. |
|
|
Definition at line 45 of file PL_PRM_Constrained.h. References FALSE, TRUE, and useJacobian. |
|
|
Definition at line 48 of file PL_PRM_Constrained.h. References FALSE, TRUE, and useOrientConstraint. |
|
|
Definition at line 46 of file PL_PRM_Constrained.h. References FALSE, TRUE, and usePlanarConstraint. |
|
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 709 of file PL_PRM_Constrained.cpp. References DEF_ERR_TOLERANCE, and Error(). Referenced by PL_RRT_ClosedChain::AdjustConfiguration(), and IsInterfering(). Here is the call graph for this function:  |
|
||||||||||||
|
Reimplemented from PL_PRM_ClosedRGD. Definition at line 936 of file PL_PRM_ClosedChain.cpp. References ALG_CLOSEDCHAIN_APD, ALG_CLOSEDCHAIN_JACOBIAN, ALG_CLOSEDCHAIN_LOCAL, ALG_CLOSEDCHAIN_RGD, PL_PRM_ClosedLocalJacobian::IsInterfering(), PL_PRM_ClosedJacobian::IsInterfering(), PL_PRM_ClosedAPDecomp::IsInterfering(), PL_PRM_ClosedRGD::IsInterfering(), and m_nAlgorithm. Here is the call graph for this function: 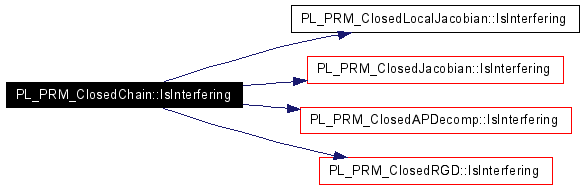 |
|
|
Definition at line 774 of file PL_PRM_Constrained.cpp. References IsClosed(), and PL_GraphBase::IsInterfering(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 714 of file PL_PRM_Constrained.cpp. References DEF_DIST_TOLERANCE, PL_GraphBase::Distance(), edgeFrag, PlannerBase::HasTimeLimitExpired(), PL_GraphBase::IsInterfering(), MakeItClosed(), MAX_ITERATION, MAX_RETRY, and MAX_RETRY2. Referenced by ConnectEdgesFull(), PL_RRT_ClosedChain::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoal2(), PL_RRT_ClosedChain::Extend(), and GenerateRandomConfigForPose(). Here is the call graph for this function: 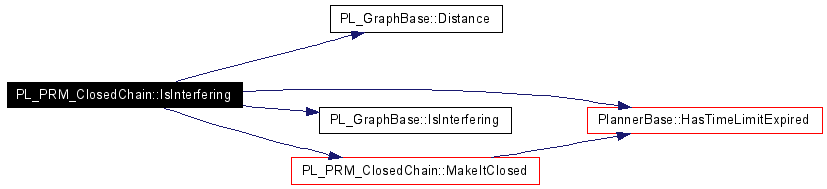 |
|
|
Reimplemented from PL_PRM_ClosedRGD. Definition at line 922 of file PL_PRM_ClosedChain.cpp. References ALG_CLOSEDCHAIN_APD, ALG_CLOSEDCHAIN_JACOBIAN, ALG_CLOSEDCHAIN_LOCAL, ALG_CLOSEDCHAIN_RGD, m_nAlgorithm, PL_PRM_ClosedLocalJacobian::MakeItClosed(), PL_PRM_ClosedJacobian::MakeItClosed(), PL_PRM_ClosedAPDecomp::MakeItClosed(), and PL_PRM_ClosedRGD::MakeItClosed(). Here is the call graph for this function: 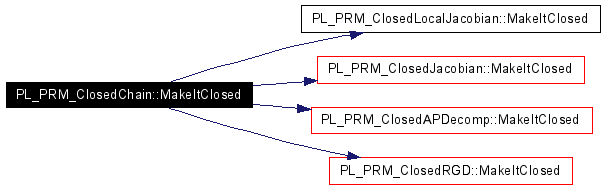 |
|
|
Definition at line 677 of file PL_PRM_Constrained.cpp. References DEF_ERR_TOLERANCE, DEF_NEIGHBOR, Error(), PL_GraphBase::GenerateRandomConfig(), PlannerBase::HasTimeLimitExpired(), MAX_ITERATION, and MAX_RETRY. Referenced by IsInterfering(), and PL_RRT_ClosedChain::TestRGDConnection(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_PRM_ClosedLocalJacobian. Reimplemented in PL_RRT_ClosedChain, and PL_RRT_ClosedChain. |
|
|
|
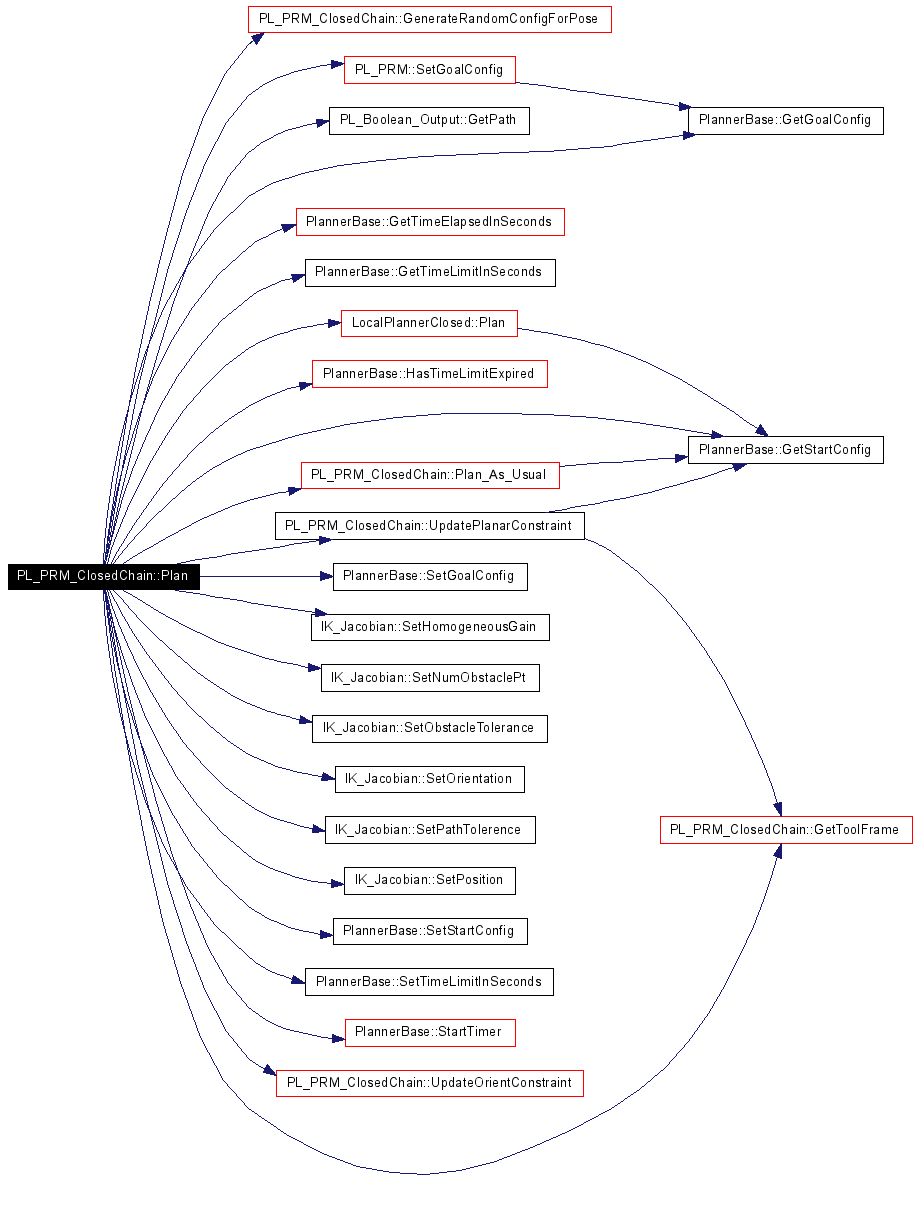
Definition at line 211 of file PL_PRM_Constrained.cpp. References PA_Points::AppendPoint(), PL_PRM::BuildInitRoadMap(), PA_Points::Clear(), PL_PRM::diagonal_squared, PL_PRM::EnhanceRoadMap(), FALSE, PL_PRM::FindPath(), PL_GraphBase::GetCspaceRange(), PlannerBase::GetStartConfig(), PL_GraphBase::goalNode, PL_GraphBase::graphPath, PlannerBase::guid, PL_GraphBase::IsInterfering(), PL_PRM::lastPlanningState, Semaphore::Lock(), PASS, PL_Boolean_Output::path, PRM_BUILD_INIT_ROADMAP, PRM_DONE, PRM_ENHANCE_ROADMAP, PRM_FAILURE, PRM_FIND_PATH, PRM_START, PRM_TRANSLATE_PATH, PRM_VERIFY_PATH, PL_GraphBase::startNode, TIMER_EXPIRED, TranslatePath(), Semaphore::Unlock(), and PL_PRM::VerifyPath(). Referenced by Plan(). Here is the call graph for this function: 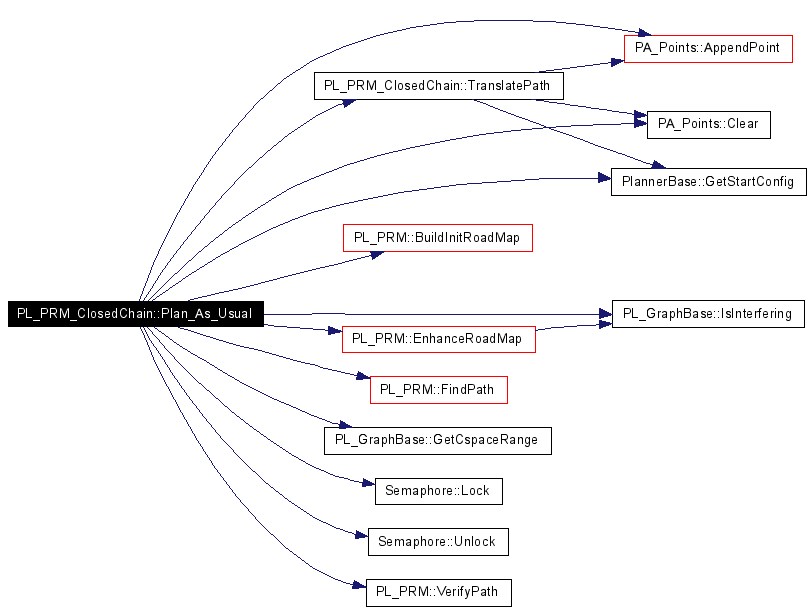 |
|
|
Definition at line 142 of file PL_PRM_ClosedChain.h. References m_nAlgorithm. |
|
|
Reimplemented from PL_PRM_ClosedLocalJacobian. Reimplemented in PL_RRT_ClosedChain, and PL_RRT_ClosedChain. |
|
|
Reimplemented from PL_PRM_ClosedLocalJacobian. Reimplemented in PL_RRT_ClosedChain, and PL_RRT_ClosedChain. Definition at line 49 of file PL_PRM_Constrained.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DeactivateFrames(), CD_BasicStyle::DOF(), CollisionDetectorBase::GetUniverse(), pCollisionDetector, planner, IK_Jacobian::SetCollisionDetector(), and PL_PRM::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function: 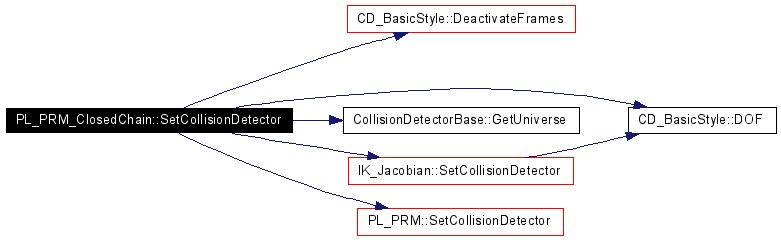 |
|
|
Definition at line 42 of file PL_PRM_Constrained.h. References TRUE, and useGoalPose. |
|
|
Definition at line 40 of file PL_PRM_Constrained.h. References TRUE, and useJacobian. |
|
|
Definition at line 43 of file PL_PRM_Constrained.h. References TRUE, and useOrientConstraint. |
|
|
Definition at line 41 of file PL_PRM_Constrained.h. References TRUE, and usePlanarConstraint. |
|
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 977 of file PL_PRM_Constrained.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), FAIL, PlannerBase::GetStartConfig(), PL_GraphBase::graphPath, and PL_Boolean_Output::path. Referenced by Plan_As_Usual(). Here is the call graph for this function:  |
|
|
Definition at line 789 of file PL_PRM_Constrained.cpp. References Matrix4x4::Identity(), orientDesired, and Matrix4x4::Rotate(). Referenced by GetClosedConfiguration(), and Plan(). Here is the call graph for this function:  |
|
|
Definition at line 784 of file PL_PRM_Constrained.cpp. References PlannerBase::GetStartConfig(), GetToolFrame(), and planeDesired. Referenced by GetClosedConfiguration(), and Plan(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 73 of file PL_PRM_Constrained.h. Referenced by ConnectEdgesFull(), PL_RRT_ClosedChain::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoal2(), PL_RRT_ClosedChain::Extend(), IsInterfering(), PL_PRM_ClosedChain(), PL_RRT_ClosedChain::TestAPDecompConnection(), and ~PL_PRM_ClosedChain(). |
|
|
Reimplemented from PL_PRM_ClosedBase. Definition at line 88 of file PL_PRM_Constrained.h. Referenced by ConnectEdgesFull(), and PL_PRM_ClosedChain(). |
|
|
Definition at line 143 of file PL_PRM_ClosedChain.h. Referenced by IsInterfering(), MakeItClosed(), SetAlgorithm(), and PL_RRT_ClosedChain::TestAPDecompConnection(). |
|
|
Definition at line 80 of file PL_PRM_Constrained.h. Referenced by Error(), GenerateRandomConfig(), and UpdateOrientConstraint(). |
|
|
Reimplemented from PL_PRM_ClosedLocalJacobian. Definition at line 74 of file PL_PRM_Constrained.h. Referenced by PL_PRM_ClosedChain(), SetCollisionDetector(), and ~PL_PRM_ClosedChain(). |
|
|
Definition at line 79 of file PL_PRM_Constrained.h. Referenced by GenerateRandomConfig(), and UpdatePlanarConstraint(). |
|
|
Reimplemented from PL_PRM_ClosedLocalJacobian. Definition at line 89 of file PL_PRM_Constrained.h. Referenced by PL_PRM_ClosedChain(), Plan(), SetCollisionDetector(), and ~PL_PRM_ClosedChain(). |
|
|
Definition at line 76 of file PL_PRM_Constrained.h. Referenced by PL_RRT_ClosedChain::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoal2(), GetUseGoalPose(), PL_PRM_ClosedChain(), Plan(), and SetUseGoalPose(). |
|
|
Definition at line 75 of file PL_PRM_Constrained.h. Referenced by GetUseJacobian(), PL_PRM_ClosedChain(), Plan(), and SetUseJacobian(). |
|
|
|
Definition at line 77 of file PL_PRM_Constrained.h. Referenced by Error(), GenerateRandomConfig(), GetUsePlanarConstraint(), PL_PRM_ClosedChain(), Plan(), and SetUsePlanarConstraint(). |
 1.4.6-NO
1.4.6-NO