#include <planners/atace/PL_RRT_Constrained.h>
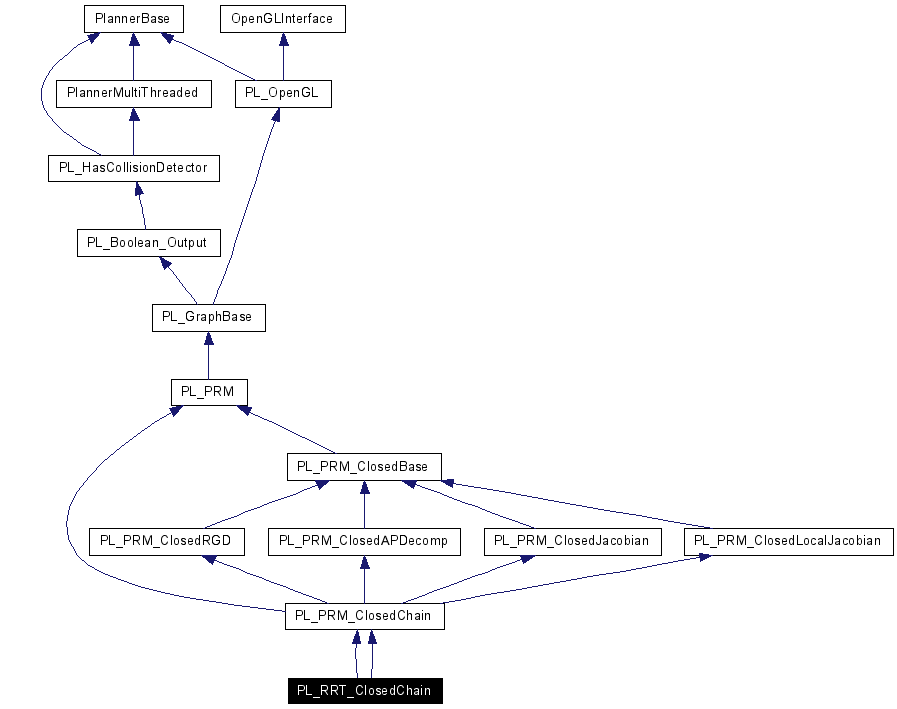
Inherits PL_PRM_ClosedChain, and PL_PRM_ClosedChain.
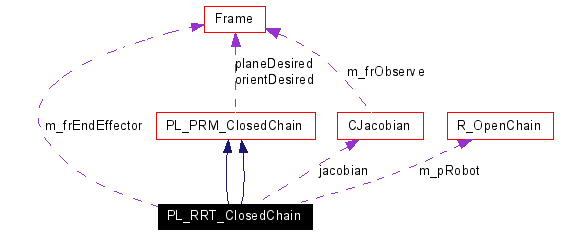
Inheritance diagram for PL_RRT_ClosedChain:
Definition at line 7 of file PL_RRT_Constrained.h.
|
|
Definition at line 39 of file PL_RRT_Constrained.cpp. References jacobian, m_bUseJacobian, m_goalVert, and m_rootVert. |
|
|
Definition at line 48 of file PL_RRT_Constrained.cpp. References ClearTree(), jacobian, and m_rootVert. Here is the call graph for this function:  |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
||||||||||||||||
|
Definition at line 640 of file PL_RRT_Constrained.cpp. References VertexInfoInTree::conf, CopyPath(), VertexInfoInTree::edge, PlannerBase::guid, Semaphore::Lock(), m_vertices, and Semaphore::Unlock(). Referenced by ConnectToGoal(), ConnectToGoal2(), and Plan(). Here is the call graph for this function: 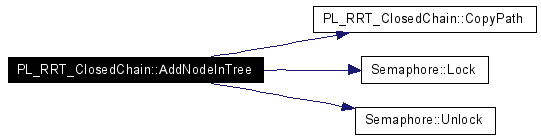 |
|
|
Definition at line 373 of file PL_RRT_Constrained.cpp. References CJacobian::GetMatrix(), PL_PRM_ClosedChain::GetToolFrame(), Frame::GetTranslationVector(), Matrixmxn::Inverse(), PL_PRM_ClosedChain::IsClosed(), jacobian, m_frEndEffector, m_nDof, Rad2Deg(), CJacobian::SetConfiguration(), CJacobian::SetInterestPoint(), and PL_PRM_ClosedChain::useOrientConstraint. Referenced by ConnectToGoalJacobian(), ExtendJacobian(), and TestJacobianConnection(). Here is the call graph for this function: 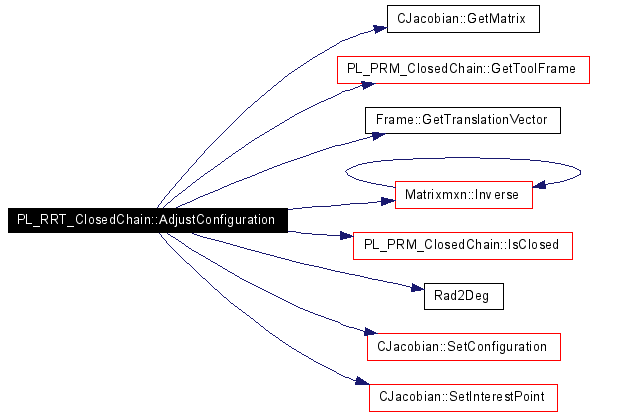 |
|
||||||||||||
|
|
|
||||||||||||
|
|
|
||||||||||||
|
Definition at line 726 of file PL_RRT_Constrained.cpp. References PA_Points::AppendPoint(), PA_Points::GetPoint(), and PA_Points::Size(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 718 of file PL_RRT_Constrained.cpp. References PA_Points::AppendPoint(), and PA_Points::Size(). Here is the call graph for this function:  |
|
|
|
|
|
Definition at line 623 of file PL_RRT_Constrained.cpp. References PlannerBase::guid, Semaphore::Lock(), and m_vertices. Referenced by CreateTree(), and ~PL_RRT_ClosedChain(). Here is the call graph for this function:  |
|
|
Definition at line 863 of file PL_RRT_Constrained.cpp. References DEF_NEIGHBOR, PL_PRM_ClosedChain::GenerateRandomConfig(), PlannerBase::GetStartConfig(), jacobian, Log(), and m_pRobot. Here is the call graph for this function:  |
|
|
Definition at line 648 of file PL_RRT_ClosedChain.cpp. References DEF_NEIGHBOR, PL_PRM_ClosedChain::GenerateRandomConfig(), PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), jacobian, Log(), and m_pRobot. Here is the call graph for this function: 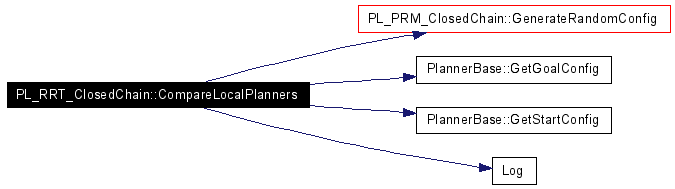 |
|
|
|
|
|
|
|
|
Definition at line 448 of file PL_RRT_Constrained.cpp. References AddNodeInTree(), PA_Points::AppendPoint(), PL_PRM_ClosedChain::edgeFrag, ERR_SUCCESS, FindClosestInTree(), PL_PRM_ClosedChain::GenerateRandomConfigForPose(), GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), PL_PRM_ClosedChain::GetToolFrame(), PL_PRM_ClosedChain::IsInterfering(), m_goalVert, MAX_CONF_RETRY, and PL_PRM_ClosedChain::useGoalPose. Referenced by Plan(). Here is the call graph for this function: 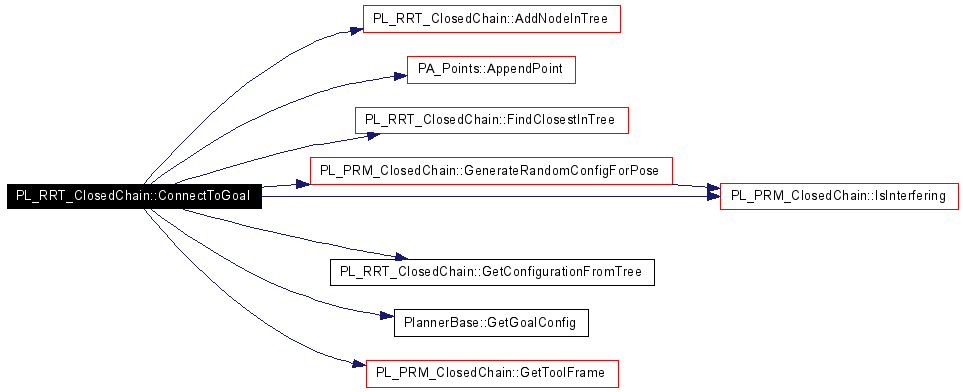 |
|
|
Definition at line 495 of file PL_RRT_Constrained.cpp. References AddNodeInTree(), PA_Points::AppendPoint(), PL_PRM_ClosedChain::edgeFrag, ERR_FAIL, ERR_SUCCESS, GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), PL_PRM_ClosedChain::IsInterfering(), and m_goalVert. Here is the call graph for this function: 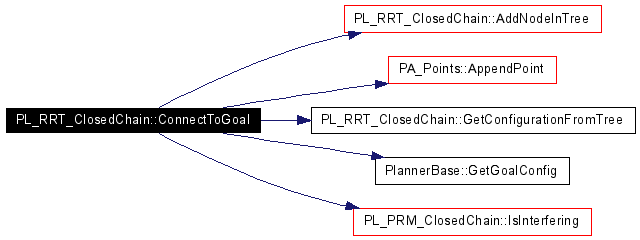 |
|
|
Definition at line 401 of file PL_RRT_Constrained.cpp. References AddNodeInTree(), PA_Points::AppendPoint(), PL_PRM_ClosedChain::edgeFrag, ERR_SUCCESS, FindClosestInTree(), PL_PRM_ClosedChain::GenerateRandomConfigForPose(), GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), PL_PRM_ClosedChain::GetToolFrame(), PL_PRM_ClosedChain::IsInterfering(), m_goalVert, MAX_CONF_RETRY, and PL_PRM_ClosedChain::useGoalPose. Here is the call graph for this function: 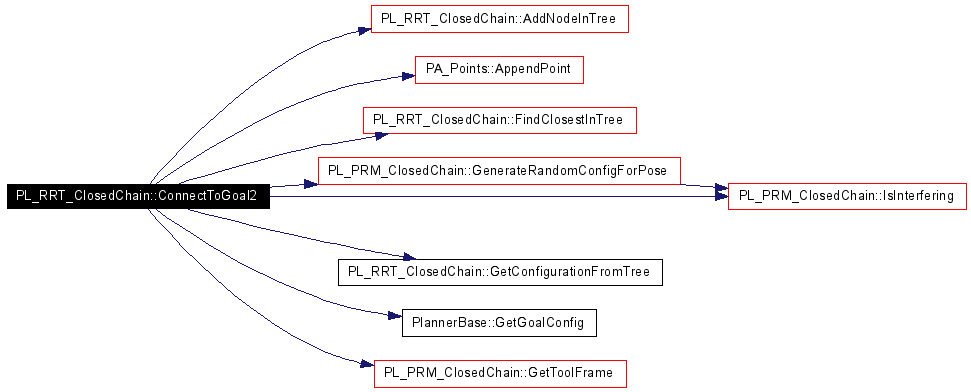 |
|
|
Definition at line 523 of file PL_RRT_Constrained.cpp. References AdjustConfiguration(), PA_Points::AppendPoint(), PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, DEF_DIST_TOLERANCE, DEF_INCREMENT, Configuration::DOF(), ERR_FAIL, GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), CJacobian::GetMatrix(), Matrixmxn::Inverse(), CD_Bool::IsInterfering(), jacobian, Log(), m_frEndEffector, m_nDof, VectorN::Magnitude(), MIN_DIST_CHANGE, CJacobian::SetConfiguration(), CJacobian::SetInterestPoint(), and PL_PRM_ClosedChain::useOrientConstraint. Referenced by Plan(). Here is the call graph for this function: 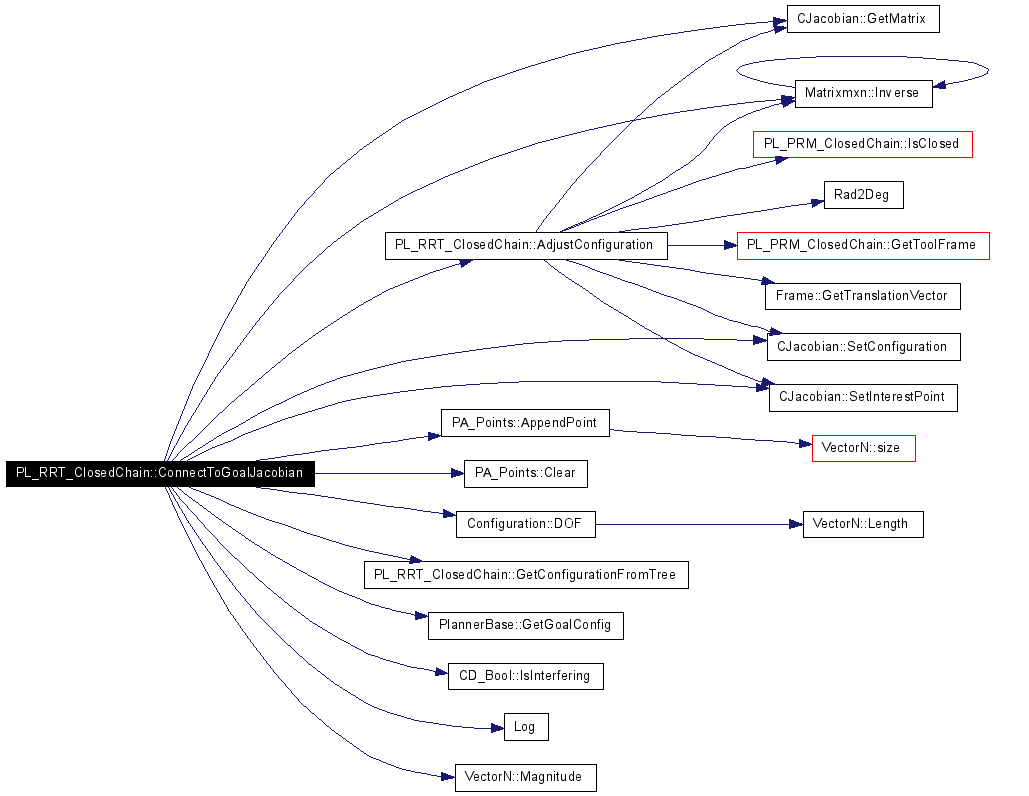 |
|
||||||||||||
|
Definition at line 45 of file PL_RRT_ClosedChain.h. |
|
||||||||||||
|
Definition at line 56 of file PL_RRT_Constrained.h. Referenced by AddNodeInTree(). |
|
|
|
|
|
Definition at line 604 of file PL_RRT_Constrained.cpp. References ClearTree(), VertexInfoInTree::conf, PlannerBase::guid, Semaphore::Lock(), m_rootVert, m_vertices, and Semaphore::Unlock(). Referenced by Plan(). Here is the call graph for this function: 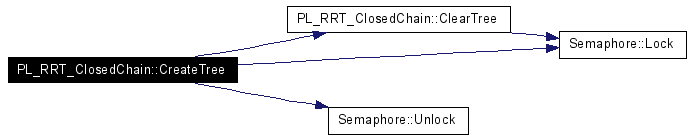 |
|
||||||||||||
|
|
|
||||||||||||
|
Definition at line 690 of file PL_RRT_Constrained.cpp. References PL_HasCollisionDetector::collisionDetector, PL_PRM::dist, CD_JointLimits::JointDisplacement(), and VectorN::Length(). Referenced by Extend(), FindClosestInTree(), and TestRGDConnection(). Here is the call graph for this function: 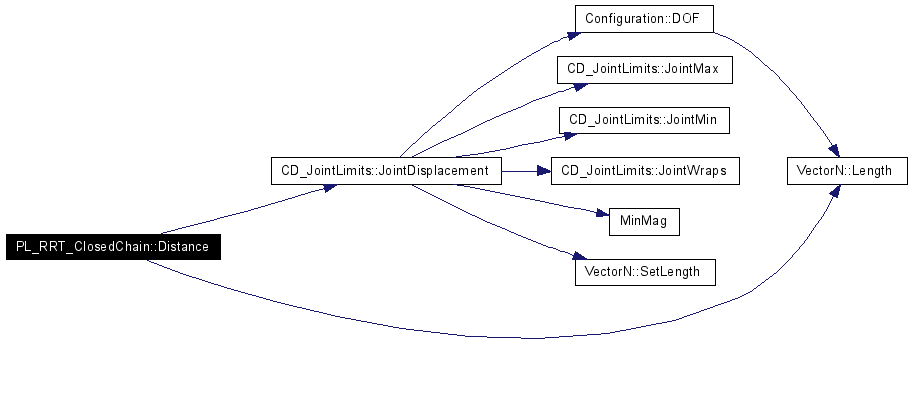 |
|
|
Reimplemented from PL_PRM. |
|
|
Reimplemented from PL_PRM. Definition at line 78 of file PL_RRT_Constrained.cpp. References VertexInfoInTree::conf, PlannerBase::guid, Semaphore::Lock(), m_trajTree, and m_vertices. Here is the call graph for this function:  |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||
|
Definition at line 243 of file PL_RRT_Constrained.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), PL_PRM::dist, Distance(), PL_PRM_ClosedChain::edgeFrag, ERR_FAIL, ERR_SUCCESS, PL_PRM_ClosedChain::GetClosedConfiguration(), PL_PRM_ClosedChain::IsInterfering(), LEN_STEP_SIZE, and MAX_CONF_RETRY. Referenced by Plan(). Here is the call graph for this function: 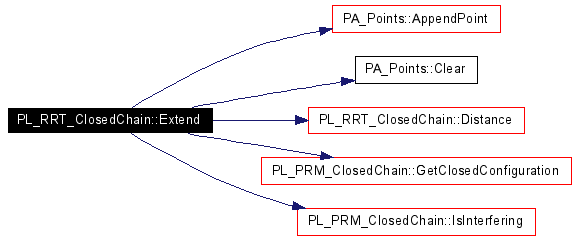 |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||
|
Definition at line 286 of file PL_RRT_Constrained.cpp. References AdjustConfiguration(), PA_Points::AppendPoint(), PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, DEF_INCREMENT, CJacobian::GetMatrix(), Matrixmxn::Inverse(), CD_Bool::IsInterfering(), jacobian, LEN_STEP_SIZE, m_frEndEffector, m_nDof, VectorN::Magnitude(), CJacobian::SetConfiguration(), CJacobian::SetInterestPoint(), and PL_PRM_ClosedChain::useOrientConstraint. Referenced by Plan(). Here is the call graph for this function: 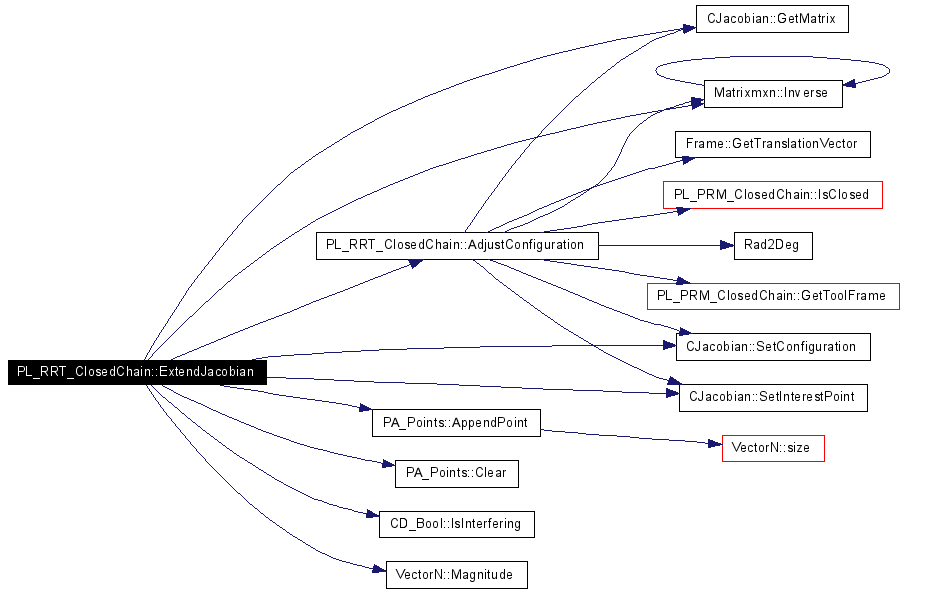 |
|
|
|
|
|
Definition at line 656 of file PL_RRT_Constrained.cpp. References VertexInfoInTree::conf, Distance(), and m_vertices. Referenced by ConnectToGoal(), ConnectToGoal2(), and Plan(). Here is the call graph for this function:  |
|
|
|
|
|
Definition at line 683 of file PL_RRT_Constrained.cpp. References VertexInfoInTree::conf. Referenced by ConnectToGoal(), ConnectToGoal2(), ConnectToGoalJacobian(), and Plan(). |
|
|
|
|
|
Definition at line 701 of file PL_RRT_Constrained.cpp. References VertexInfoInTree::edge. Referenced by RetrievePath(). |
|
||||||||||||
|
|
|
||||||||||||
|
Definition at line 734 of file PL_RRT_Constrained.cpp. References PA_Points::Size(). Referenced by RetrievePath(). Here is the call graph for this function:  |
|
|
Definition at line 568 of file PL_RRT_ClosedChain.cpp. References PL_HasCollisionDetector::collisionDetector, CD_Linear::GetNumberOfTimesCalledLinear(), CD_Bool::GetNumberOfTimesCalledPoint(), PlannerBase::GetTimeElapsedInSeconds(), Log(), m_vertices, PL_Boolean_Output::path, and PA_Points::Size(). Here is the call graph for this function: 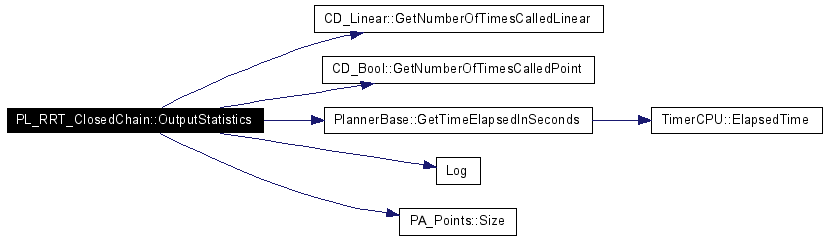 |
|
|
Reimplemented from PL_PRM_ClosedChain. |
|
|
Reimplemented from PL_PRM_ClosedChain. Definition at line 161 of file PL_RRT_Constrained.cpp. References AddNodeInTree(), PA_Points::Clear(), ConnectToGoal(), ConnectToGoalJacobian(), CreateTree(), ERR_FAIL, ERR_SUCCESS, ERR_TIMEOUT, Extend(), ExtendJacobian(), FindClosestInTree(), PL_PRM_ClosedChain::GenerateRandomConfig(), GetConfigurationFromTree(), PlannerBase::GetStartConfig(), PlannerBase::HasTimeLimitExpired(), jacobian, m_bUseJacobian, m_goalVert, m_pRobot, PL_Boolean_Output::path, RetrievePath(), and PlannerBase::StartTimer(). Here is the call graph for this function: 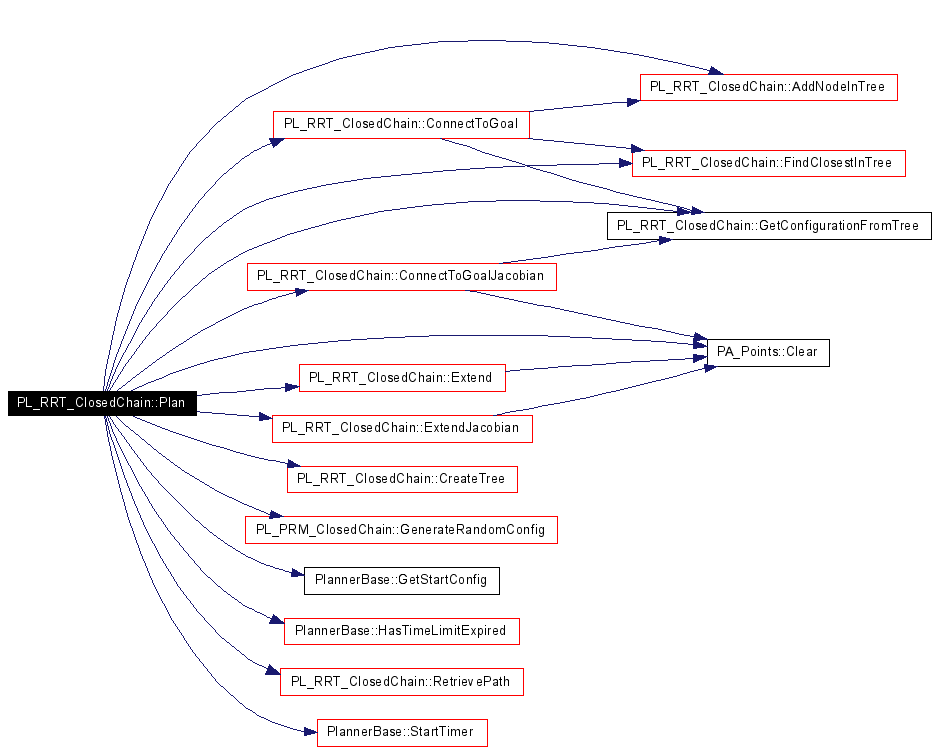 |
|
|
|
|
|
Definition at line 708 of file PL_RRT_Constrained.cpp. References GetPathFromTree(), InsertPath(), and PL_Boolean_Output::path. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_PRM_ClosedChain. |
|
|
Reimplemented from PL_PRM_ClosedChain. Definition at line 56 of file PL_RRT_Constrained.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DeactivateFrames(), CD_BasicStyle::DOF(), CD_BasicStyle::GetFrameManager(), FrameManager::GetFrameRef(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), Matrix4x4::Identity(), jacobian, m_frEndEffector, m_nDof, m_nToolFrame, m_pRobot, and PL_PRM::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function: 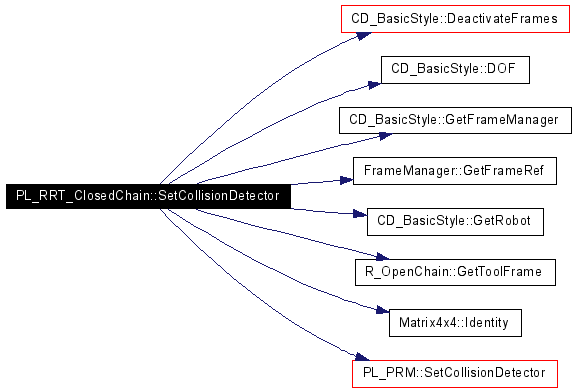 |
|
||||||||||||||||
|
Definition at line 627 of file PL_RRT_ClosedChain.cpp. References ALG_CLOSEDCHAIN_APD, PA_Points::AppendPoint(), PA_Points::Clear(), PL_PRM_ClosedChain::edgeFrag, PL_PRM_ClosedAPDecomp::IsInterfering(), and PL_PRM_ClosedChain::m_nAlgorithm. Here is the call graph for this function:  |
|
||||||||||||||||
|
|
|
||||||||||||||||
|
Definition at line 752 of file PL_RRT_Constrained.cpp. References AdjustConfiguration(), PA_Points::AppendPoint(), PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, DEF_DIST_TOLERANCE, DEF_INCREMENT, Configuration::DOF(), CJacobian::GetMatrix(), Matrixmxn::Inverse(), CD_Bool::IsInterfering(), jacobian, m_frEndEffector, m_nDof, VectorN::Magnitude(), CJacobian::SetConfiguration(), CJacobian::SetInterestPoint(), and PL_PRM_ClosedChain::useOrientConstraint. Here is the call graph for this function:  |
|
||||||||||||||||
|
|
|
||||||||||||||||
|
Definition at line 816 of file PL_RRT_Constrained.cpp. References PA_Points::AppendPoint(), DEF_DIST_TOLERANCE, Distance(), PL_GraphBase::IsInterfering(), PL_PRM_ClosedChain::MakeItClosed(), MAX_ITERATION, MAX_RETRY, and MAX_RETRY2. Here is the call graph for this function: 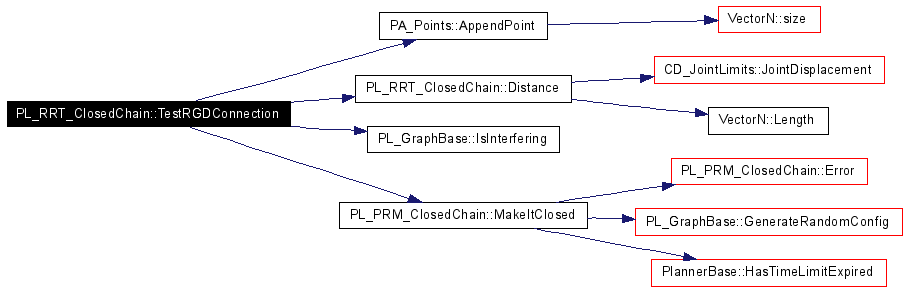 |
|
|
Reimplemented from PL_PRM_ClosedJacobian. Definition at line 29 of file PL_RRT_Constrained.h. Referenced by AdjustConfiguration(), CompareJacobianAndRGD(), CompareLocalPlanners(), ConnectToGoalJacobian(), ExtendJacobian(), PL_RRT_ClosedChain(), Plan(), SetCollisionDetector(), TestJacobianConnection(), and ~PL_RRT_ClosedChain(). |
|
|
Definition at line 23 of file PL_RRT_Constrained.h. Referenced by PL_RRT_ClosedChain(), and Plan(). |
|
|
Reimplemented from PL_PRM_ClosedJacobian. Definition at line 28 of file PL_RRT_Constrained.h. Referenced by AdjustConfiguration(), ConnectToGoalJacobian(), ExtendJacobian(), SetCollisionDetector(), and TestJacobianConnection(). |
|
|
Definition at line 18 of file PL_RRT_Constrained.h. Referenced by ConnectToGoal(), ConnectToGoal2(), PL_RRT_ClosedChain(), and Plan(). |
|
|
Reimplemented from PL_PRM_ClosedJacobian. Definition at line 26 of file PL_RRT_Constrained.h. Referenced by AdjustConfiguration(), ConnectToGoalJacobian(), ExtendJacobian(), SetCollisionDetector(), and TestJacobianConnection(). |
|
|
Reimplemented from PL_PRM_ClosedJacobian. Definition at line 27 of file PL_RRT_Constrained.h. Referenced by SetCollisionDetector(). |
|
|
Reimplemented from PL_PRM_ClosedJacobian. Definition at line 25 of file PL_RRT_Constrained.h. Referenced by CompareJacobianAndRGD(), CompareLocalPlanners(), Plan(), and SetCollisionDetector(). |
|
|
Definition at line 19 of file PL_RRT_Constrained.h. Referenced by CreateTree(), PL_RRT_ClosedChain(), and ~PL_RRT_ClosedChain(). |
|
|
Definition at line 33 of file PL_RRT_Constrained.h. Referenced by DrawExplicit(). |
|
|
Definition at line 24 of file PL_RRT_ClosedChain.h. |
|
|
Definition at line 34 of file PL_RRT_Constrained.h. Referenced by AddNodeInTree(), ClearTree(), CreateTree(), DrawExplicit(), FindClosestInTree(), and OutputStatistics(). |
 1.4.6-NO
1.4.6-NO