#include <planners/neural/PL_Neural.h>
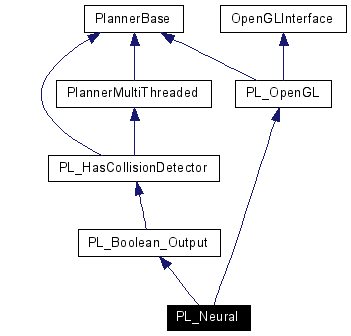
Inherits PL_Boolean_Output, and PL_OpenGL.
Inheritance diagram for PL_Neural:
Public Member Functions | |
| PL_Neural () | |
| virtual | ~PL_Neural () |
| virtual bool | DrawExplicit () const |
| virtual void | DrawUniversePortion () const |
| bool | Plan () |
| void | PlanMultiThread (void *data) |
Protected Member Functions | |
| void | AddObstaclePoint (const Configuration &c) const |
| void | ClampAllPointsToJointLimits () |
| Configuration | ClampToJointLimits (const Configuration &c) const |
| bool | CheckPathForObstacles () |
| int | ClosestObstacleToEdge (const unsigned int edgeNum) const |
| int | ClosestObstacleToPoint (const Configuration &c) const |
| int | EdgeInCollision () const |
| Configuration | EdgeRepulsion (const unsigned int edgeNum) const |
| Configuration | GenerateRandomConfig () const |
| int | NodesInCollision () const |
| void | Perturb (const unsigned int pointNum) |
| void | Relax (const unsigned int pointNum) |
| void | RelaxUntilSettled () |
| Configuration | RepulsiveVector (const Configuration &c) const |
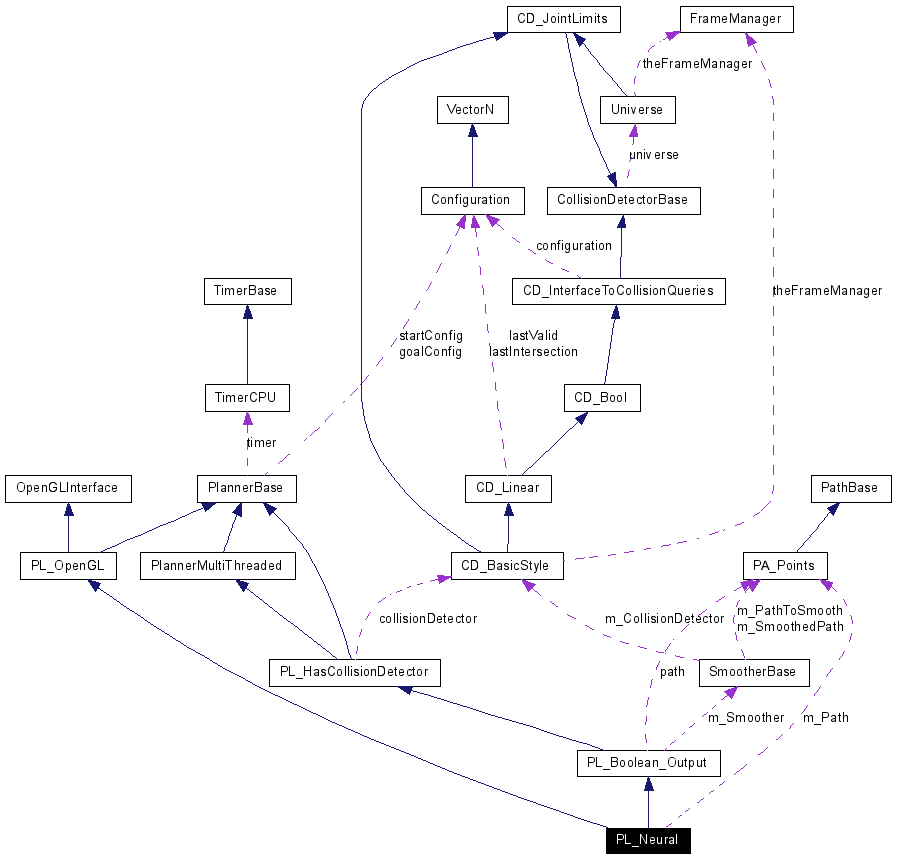
Private Attributes | |
| PA_Points | m_Path |
| std::vector< Configuration > | m_ObstacleLocations |
Definition at line 13 of file PL_Neural.h.
|
|
Definition at line 13 of file PL_Neural.cpp. |
|
|
Definition at line 20 of file PL_Neural.cpp. |
|
|
Definition at line 27 of file PL_Neural.cpp. References m_ObstacleLocations. Referenced by EdgeInCollision(), and NodesInCollision(). |
|
|
Definition at line 35 of file PL_Neural.cpp. References EdgeInCollision(), and NodesInCollision(). Here is the call graph for this function: 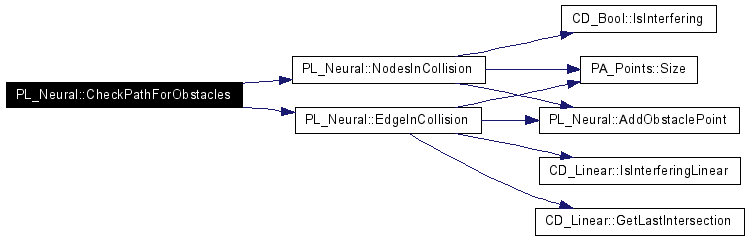 |
|
|
Definition at line 50 of file PL_Neural.cpp. References ClampToJointLimits(), m_Path, and PA_Points::Size(). Referenced by RelaxUntilSettled(). Here is the call graph for this function: 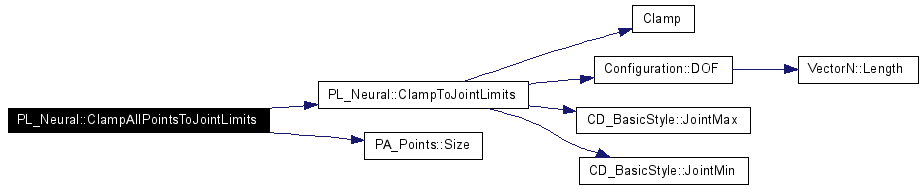 |
|
|
Definition at line 64 of file PL_Neural.cpp. References Clamp(), PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), CD_BasicStyle::JointMax(), and CD_BasicStyle::JointMin(). Referenced by ClampAllPointsToJointLimits(). Here is the call graph for this function: 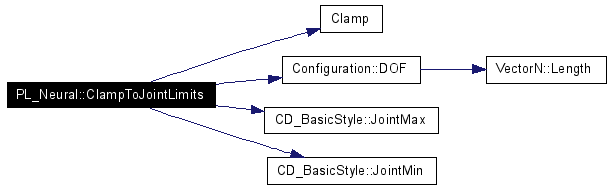 |
|
|
Definition at line 81 of file PL_Neural.cpp. References DistanceSquared(), m_ObstacleLocations, and m_Path. Here is the call graph for this function:  |
|
|
Definition at line 110 of file PL_Neural.cpp. References m_ObstacleLocations. |
|
|
Reimplemented from PL_OpenGL. Definition at line 136 of file PL_Neural.cpp. References PL_OpenGL::Draw(), Semaphore::Lock(), m_ObstacleLocations, m_Path, Color::red, and Color::yellow_50. Here is the call graph for this function:  |
|
|
Reimplemented from PL_OpenGL. Definition at line 164 of file PL_Neural.cpp. References PL_OpenGL::DrawOverlay(), PlannerBase::guid, Semaphore::Lock(), m_ObstacleLocations, m_Path, Color::red, and Color::yellow_50. Here is the call graph for this function:  |
|
|
Definition at line 218 of file PL_Neural.cpp. References AddObstaclePoint(), PL_HasCollisionDetector::collisionDetector, CD_Linear::GetLastIntersection(), CD_Linear::IsInterferingLinear(), m_Path, and PA_Points::Size(). Referenced by CheckPathForObstacles(). Here is the call graph for this function: 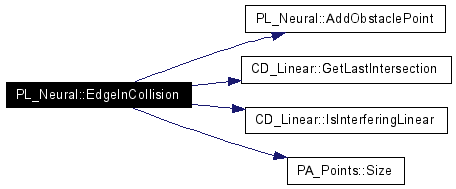 |
|
|
Definition at line 241 of file PL_Neural.cpp. References ClosestPoint(), m_ObstacleLocations, m_Path, and VectorN::MagSquared(). Here is the call graph for this function:  |
|
|
Definition at line 272 of file PL_Neural.cpp. References PL_HasCollisionDetector::collisionDetector, PlannerBase::GetStartConfig(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and VectorN::Size(). Referenced by Perturb(). Here is the call graph for this function: 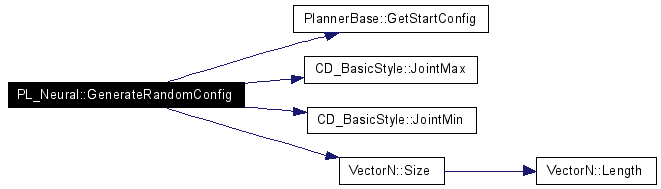 |
|
|
Definition at line 291 of file PL_Neural.cpp. References AddObstaclePoint(), PL_HasCollisionDetector::collisionDetector, CD_Bool::IsInterfering(), m_Path, and PA_Points::Size(). Referenced by CheckPathForObstacles(). Here is the call graph for this function: 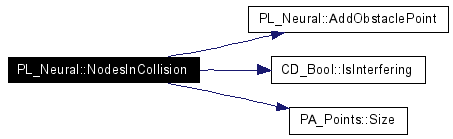 |
|
|
Definition at line 312 of file PL_Neural.cpp. References GenerateRandomConfig(), m_Path, and PA_Points::Size(). Here is the call graph for this function: 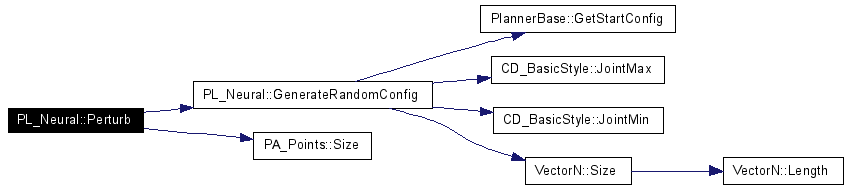 |
|
|
Implements PlannerBase. Definition at line 331 of file PL_Neural.cpp. References PA_Points::AppendPoint(), PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), and m_Path. Here is the call graph for this function:  |
|
|
|
|
|
Definition at line 383 of file PL_Neural.cpp. References m_Path, PA_Points::PhysicalLength(), and PA_Points::Size(). Referenced by RelaxUntilSettled(). Here is the call graph for this function:  |
|
|
Definition at line 420 of file PL_Neural.cpp. References ClampAllPointsToJointLimits(), m_Path, Relax(), and PA_Points::Size(). Here is the call graph for this function: 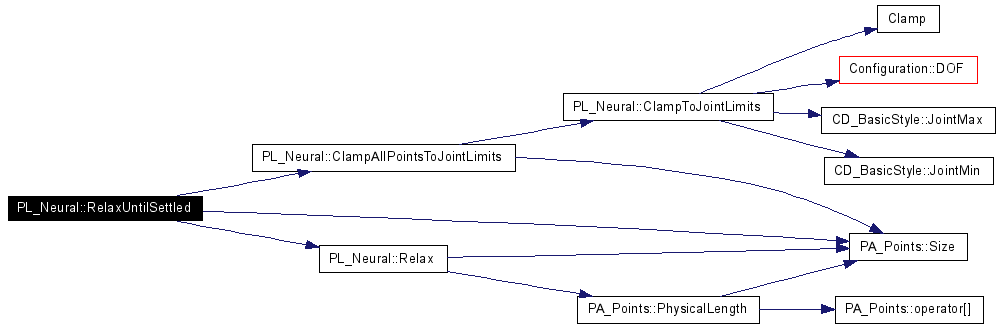 |
|
|
Definition at line 456 of file PL_Neural.cpp. References m_ObstacleLocations, and VectorN::MagSquared(). Here is the call graph for this function:  |
|
|
Definition at line 42 of file PL_Neural.h. Referenced by AddObstaclePoint(), ClosestObstacleToEdge(), ClosestObstacleToPoint(), DrawExplicit(), DrawUniversePortion(), EdgeRepulsion(), and RepulsiveVector(). |
|
|
Definition at line 41 of file PL_Neural.h. Referenced by ClampAllPointsToJointLimits(), ClosestObstacleToEdge(), DrawExplicit(), DrawUniversePortion(), EdgeInCollision(), EdgeRepulsion(), NodesInCollision(), Perturb(), Plan(), Relax(), and RelaxUntilSettled(). |
 1.4.6-NO
1.4.6-NO