#include <planners/inversekin/IK_InvKinBase.h>
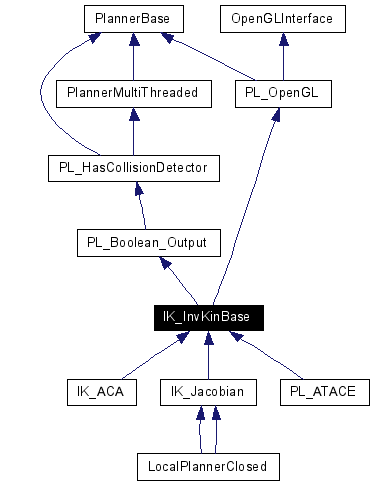
Inherits PL_Boolean_Output, and PL_OpenGL.
Inherited by IK_ACA [virtual], IK_Jacobian [virtual], and PL_ATACE.
Inheritance diagram for IK_InvKinBase:
Public Member Functions | |
| IK_InvKinBase () | |
| virtual | ~IK_InvKinBase () |
| virtual bool | DrawExplicit () const |
| virtual void | DrawUniversePortion () const |
| virtual bool | Load (const char *filename) |
| virtual bool | Plan () |
| virtual bool | Save (const char *filename) const |
| void | SetGoalFrame (const Matrix4x4 &newframe) |
| void | SetGoalFrame (const Configuration &config) |
| void | SetGoalFrame (const VectorN &dofVector) |
| void | SetGoalFrame (const double &x, const double &y, const double &z, const double &roll, const double &pitch, const double &yaw) |
| void | GetRotAngles (const Matrix4x4 &frame, double &x, double &y, double &z, double &roll, double &pitch, double &yaw) const |
| VectorN | GetRotVector (const Matrix4x4 &frame) const |
| Matrix4x4 | GetTransformFrame (const VectorN &dofVector) const |
| Matrix4x4 | GetGoalFrame () const |
| VectorN | GetGoalFrameVector () const |
| Matrix4x4 | GetToolFrame (const Configuration &config) const |
| virtual void | CopySettings (PlannerBase *original) |
Static Public Member Functions | |
| static Matrix4x4 | GetTransformFrame (const double &x, const double &y, const double &z, const double &roll, const double &pitch, const double &yaw) |
Protected Member Functions | |
| virtual void | AssignGoalConfig (const Configuration &config) |
| virtual void | InitNewSearch () |
Protected Attributes | |
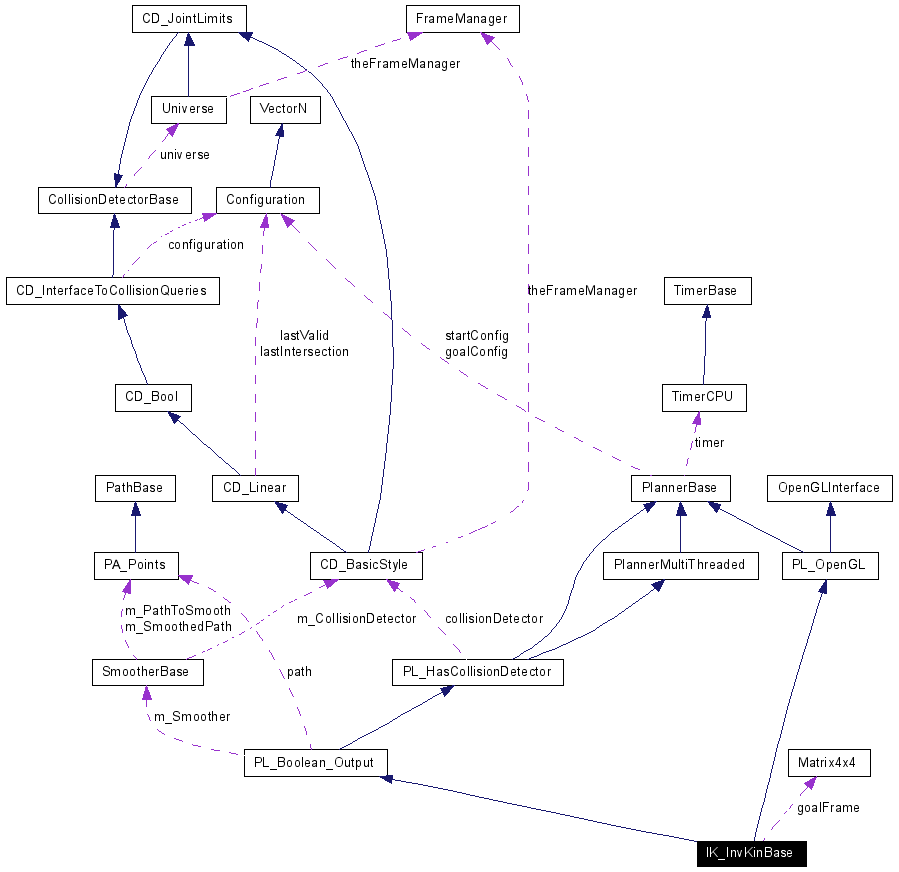
| Matrix4x4 | goalFrame |
| int | m_GoalFrameIndex |
Definition at line 30 of file IK_InvKinBase.h.
|
|
Definition at line 40 of file IK_InvKinBase.cpp. |
|
|
Definition at line 47 of file IK_InvKinBase.cpp. |
|
|
Reimplemented in IK_ACA. Definition at line 193 of file IK_InvKinBase.cpp. References PlannerBase::SetGoalConfig(). Referenced by IK_ACA::AssignGoalConfig(). Here is the call graph for this function:  |
|
|
Reimplemented from PlannerBase. Reimplemented in IK_ACA. Definition at line 170 of file IK_InvKinBase.cpp. References goalFrame. Referenced by IK_ACA::CopySettings(), and ServerBase::RefreshPlanner(). |
|
|
Reimplemented from PL_OpenGL. Reimplemented in PL_ATACE, and IK_ACA. Definition at line 58 of file IK_InvKinBase.cpp. |
|
|
Reimplemented from PL_OpenGL. Definition at line 69 of file IK_InvKinBase.cpp. References GL_Frame::GLDraw(), and goalFrame. Here is the call graph for this function:  |
|
|
Definition at line 424 of file IK_InvKinBase.cpp. References goalFrame. |
|
|
Definition at line 437 of file IK_InvKinBase.cpp. References FRAMEDOF, GetRotAngles(), goalFrame, and VectorN::SetLength(). Referenced by IK_ACA::SaveContents(). Here is the call graph for this function:  |
|
||||||||||||||||||||||||||||||||
|
Definition at line 354 of file IK_InvKinBase.cpp. References Rad2Deg(), and Sqr(). Referenced by GetGoalFrameVector(), and GetRotVector(). Here is the call graph for this function: 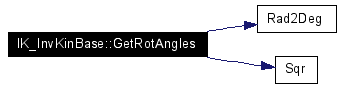 |
|
|
Definition at line 405 of file IK_InvKinBase.cpp. References FRAMEDOF, GetRotAngles(), and VectorN::SetLength(). Here is the call graph for this function:  |
|
|
Reimplemented in PL_ATACE. Definition at line 456 of file IK_InvKinBase.cpp. References PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), CD_BasicStyle::GetFrameManager(), CD_BasicStyle::JointFrameNum(), and CD_BasicStyle::SetConfiguration(). Referenced by IK_ACA::GetNextConfig(), IK_ACA::InitBestParams(), IK_ACA::MinimizeDistance(), IK_ACA::Search(), IK_ACA::Search1(), and SetGoalFrame(). Here is the call graph for this function: 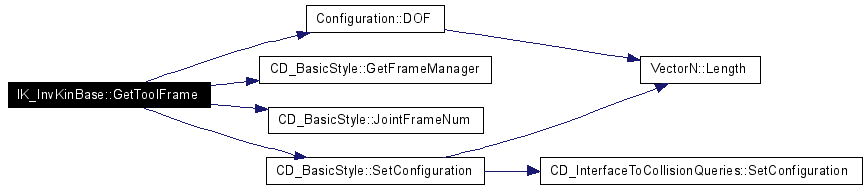 |
|
|
Definition at line 282 of file IK_InvKinBase.cpp. References FRAMEDOF, GetTransformFrame(), and VectorN::Length(). Here is the call graph for this function:  |
|
||||||||||||||||||||||||||||
|
Definition at line 303 of file IK_InvKinBase.cpp. References Deg2Rad(). Referenced by GetTransformFrame(), and SetGoalFrame(). Here is the call graph for this function:  |
|
|
Reimplemented in IK_ACA, and IK_Jacobian. Definition at line 511 of file IK_InvKinBase.cpp. Referenced by SetGoalFrame(). |
|
|
Reimplemented from PlannerBase. Reimplemented in IK_ACA. Definition at line 85 of file IK_InvKinBase.cpp. References Semaphore::Lock(), and Semaphore::Unlock(). Here is the call graph for this function:  |
|
|
Implements PlannerBase. Reimplemented in PL_ATACE, LocalPlannerClosed, LocalPlannerClosed, IK_ACA, and IK_Jacobian. Definition at line 104 of file IK_InvKinBase.cpp. |
|
|
Reimplemented from PlannerBase. Reimplemented in IK_ACA. Definition at line 115 of file IK_InvKinBase.cpp. References Semaphore::Lock(), and Semaphore::Unlock(). Here is the call graph for this function:  |
|
||||||||||||||||||||||||||||
|
Definition at line 263 of file IK_InvKinBase.cpp. References GetTransformFrame(), and SetGoalFrame(). Here is the call graph for this function:  |
|
|
Definition at line 244 of file IK_InvKinBase.cpp. References FRAMEDOF, VectorN::Length(), and SetGoalFrame(). Here is the call graph for this function:  |
|
|
Definition at line 230 of file IK_InvKinBase.cpp. References GetToolFrame(), and SetGoalFrame(). Here is the call graph for this function:  |
|
|
Definition at line 213 of file IK_InvKinBase.cpp. References goalFrame, and InitNewSearch(). Referenced by IK_ACA::LoadContents(), ServerBase::ParseGoalFrames(), and SetGoalFrame(). Here is the call graph for this function:  |
|
|
Definition at line 98 of file IK_InvKinBase.h. Referenced by CopySettings(), DrawUniversePortion(), IK_ACA::FindJointAdjust(), GetGoalFrame(), GetGoalFrameVector(), IK_ACA::GetNextConfig(), IK_ACA::InitBestParams(), IK_ACA::Search(), IK_ACA::Search1(), and SetGoalFrame(). |
|
|
Definition at line 101 of file IK_InvKinBase.h. |
 1.4.6-NO
1.4.6-NO