#include <planners/ik_aca/IK_ACA.h>
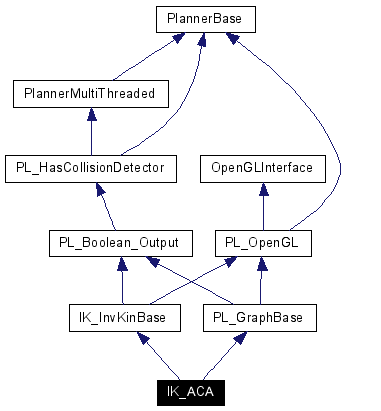
Inherits IK_InvKinBase, and PL_GraphBase.
Inheritance diagram for IK_ACA:
Public Member Functions | |
| IK_ACA () | |
| virtual | ~IK_ACA () |
| virtual bool | DrawExplicit () const |
| virtual bool | Load (const char *filename) |
| virtual bool | Plan () |
| virtual bool | Save (const char *filename) const |
| virtual void | SetStartConfig (const Configuration &configuration) |
| virtual void | SetGoalConfig (const Configuration &configuration) |
| void | SetEmbryosPerLandmark (const int &num_of_embryos) |
| int | GetEmbryosPerLandmark () const |
| virtual void | SetCollisionDetector (CollisionDetectorBase *collisionDetector) |
| virtual void | CopySettings (PlannerBase *original) |
Protected Member Functions | |
| virtual void | AssignGoalConfig (const Configuration &config) |
| virtual bool | SaveContents (std::ofstream &outfile) const |
| virtual bool | LoadContents (std::ifstream &infile) |
| virtual bool | DrawSpecific () const |
| virtual void | InitNewSearch () |
| virtual double | FrameDistance (const Matrix4x4 &frameA, const Matrix4x4 &frameB) const |
| SuccessResultType | ComputePath (const node &landmark, const list< Configuration > &myPath) |
| node | Explore () |
| SuccessResultType | Search (const node &landmark) |
| SuccessResultType | Search1 (const node &landmark) |
| VectorN | ComputeEndEffDiff (Matrix4x4 &frStart, Matrix4x4 &frEnd) |
| Configuration | GetNextConfig (Configuration &q0) |
| double | FindJointAdjust (const unsigned int &jointNum, const Matrix4x4 &toolFrame) const |
| Configuration | MinimizeDistance (const Configuration &config, list< Configuration > &minPath) |
| void | CreateEmbryo (const node &landmark, const int &embryoID) |
| void | CreateEmbryos (const node &landmark) |
Protected Attributes | |
| node_map< Configuration > * | embryo |
| list< Configuration > | searchPath |
Private Member Functions | |
| void | InitBestParams () |
Private Attributes | |
| int | embryosPerLandmark |
| node | searchLandmark |
| node | bestLandmark |
| list< Configuration > | bestPath |
| double | bestDistance_sq |
| int | m_FrameID |
| CJacobian * | jacobian |
Definition at line 33 of file IK_ACA.h.
|
|
Definition at line 56 of file IK_ACA.cpp. References DEFAULT_EMBRYOS_PER_NODE, embryo, embryosPerLandmark, FILEEXT, PL_GraphBase::fileext, FILEHEADER, PL_GraphBase::fileheader, and PL_GraphBase::G. |
|
|
Definition at line 85 of file IK_ACA.cpp. References embryo. |
|
|
Reimplemented from IK_InvKinBase. Definition at line 476 of file IK_ACA.cpp. References IK_InvKinBase::AssignGoalConfig(), embryo, embryosPerLandmark, PL_GraphBase::goalNode, and PL_GraphBase::SetGoalConfig(). Referenced by ComputePath(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 829 of file IK_ACA.cpp. References Matrix4x4::Inverse(), VectorN::SetLength(), and Matrix4x4::values. Referenced by GetNextConfig(). Here is the call graph for this function: 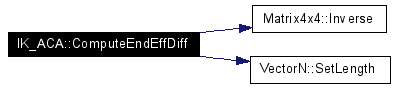 |
|
||||||||||||
|
Definition at line 1312 of file IK_ACA.cpp. References PA_Points::AppendPoint(), AssignGoalConfig(), PL_GraphBase::ClearGraphPath(), PL_GraphBase::G, PL_GraphBase::graphPath, PL_Boolean_Output::path, PL_GraphBase::startNode, and PL_GraphBase::TranslatePath(). Referenced by Plan(). Here is the call graph for this function: 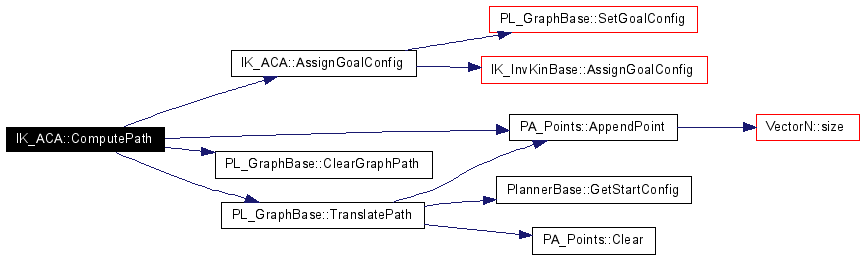 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 514 of file IK_ACA.cpp. References PL_GraphBase::CopySettings(), IK_InvKinBase::CopySettings(), embryosPerLandmark, InitNewSearch(), and SetEmbryosPerLandmark(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function: 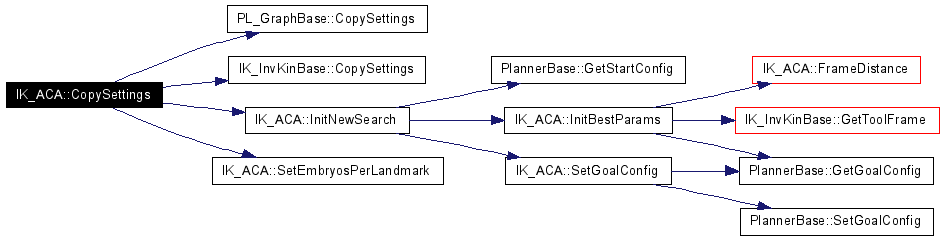 |
|
||||||||||||
|
Definition at line 555 of file IK_ACA.cpp. References PL_HasCollisionDetector::collisionDetector, embryo, PL_GraphBase::G, PL_GraphBase::GenerateRandomConfig(), CD_Linear::GetLastIntersection(), PL_GraphBase::GetMidPoint(), PlannerBase::GetStartConfig(), and PL_GraphBase::IsInterfering(). Referenced by CreateEmbryos(). Here is the call graph for this function: 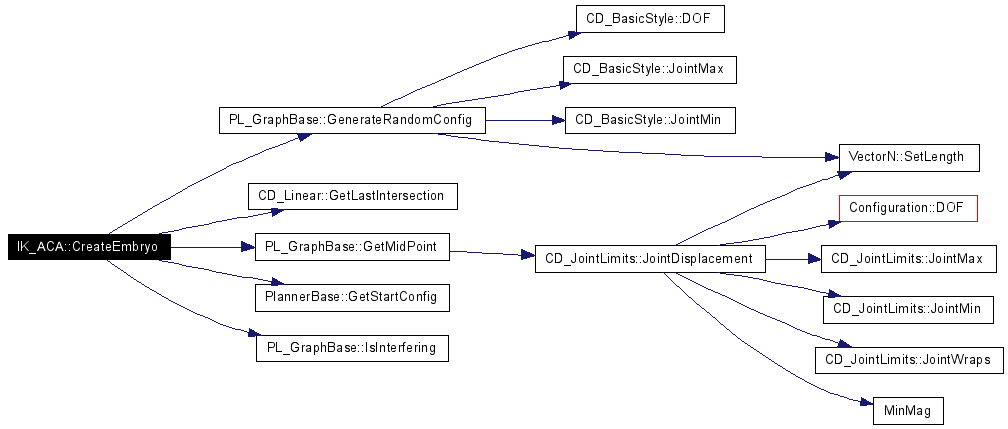 |
|
|
Definition at line 540 of file IK_ACA.cpp. References CreateEmbryo(), and embryosPerLandmark. Referenced by SetStartConfig(). Here is the call graph for this function: 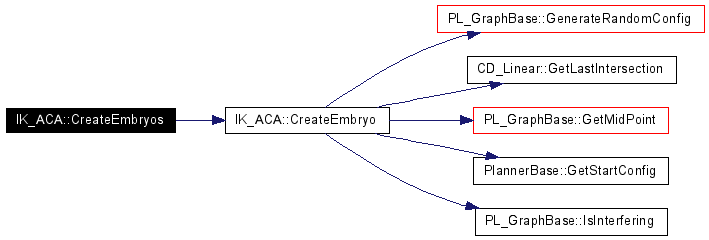 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 100 of file IK_ACA.cpp. References PL_GraphBase::DrawExplicit(). Here is the call graph for this function: 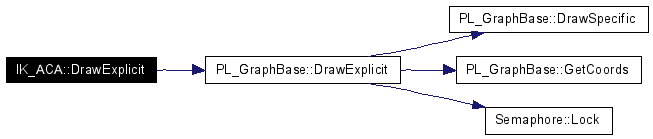 |
|
|
Reimplemented from PL_GraphBase. Definition at line 350 of file IK_ACA.cpp. References embryo, embryosPerLandmark, PL_GraphBase::G, and PL_GraphBase::GetCoords(). Here is the call graph for this function:  |
|
|
Definition at line 598 of file IK_ACA.cpp. References PL_GraphBase::Distance(), embryo, embryosPerLandmark, PL_GraphBase::G, and INFINITY. Referenced by Plan(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 917 of file IK_ACA.cpp. References PL_HasCollisionDetector::collisionDetector, DH_A, DH_ALPHA, DH_D, DH_THETA, CD_BasicStyle::GetFrameManager(), FrameManager::GetTransformRelative(), FrameManager::GetWorldFrame(), IK_InvKinBase::goalFrame, CD_BasicStyle::JointFrameNum(), CD_BasicStyle::JointType(), M_PI, PX, PY, PZ, and Rad2Deg(). Referenced by MinimizeDistance(). Here is the call graph for this function: 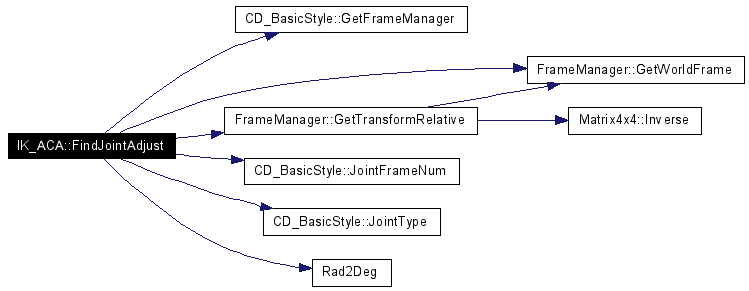 |
|
||||||||||||
|
Definition at line 1151 of file IK_ACA.cpp. References Vector4::MagSquared(), PX, PY, and PZ. Referenced by InitBestParams(), Search(), and Search1(). Here is the call graph for this function:  |
|
|
Definition at line 1195 of file IK_ACA.cpp. References embryosPerLandmark. |
|
|
Definition at line 865 of file IK_ACA.cpp. References ComputeEndEffDiff(), IK_InvKinBase::GetToolFrame(), IK_InvKinBase::goalFrame, VectorN::Magnitude(), VectorN::Normalize(), and SAMPLING_TIME. Referenced by Search1(). Here is the call graph for this function: 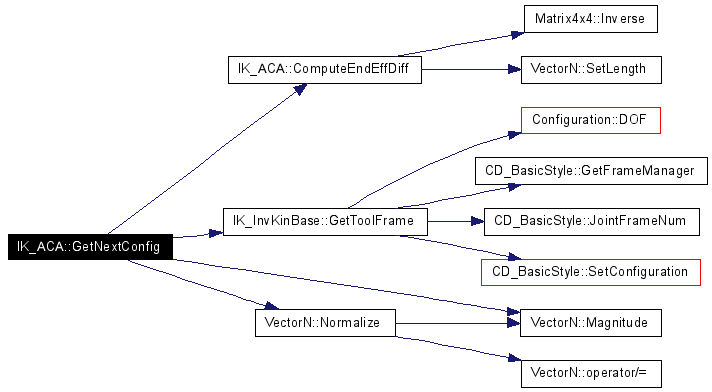 |
|
|
Definition at line 1291 of file IK_ACA.cpp. References bestDistance_sq, bestLandmark, bestPath, PL_HasCollisionDetector::collisionDetector, FrameDistance(), PlannerBase::GetGoalConfig(), IK_InvKinBase::GetToolFrame(), IK_InvKinBase::goalFrame, INFINITY, and PL_GraphBase::startNode. Referenced by InitNewSearch(). Here is the call graph for this function: 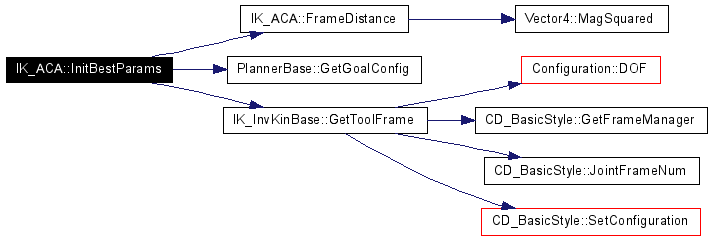 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 1272 of file IK_ACA.cpp. References PlannerBase::GetStartConfig(), InitBestParams(), searchLandmark, SetGoalConfig(), and PL_GraphBase::startNode. Referenced by CopySettings(), and SetStartConfig(). Here is the call graph for this function: 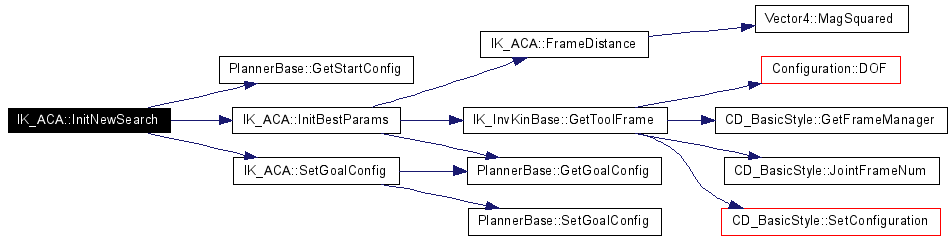 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 112 of file IK_ACA.cpp. References PL_GraphBase::Load(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 126 of file IK_ACA.cpp. References embryo, embryosPerLandmark, PL_GraphBase::G, PL_GraphBase::LoadContents(), and IK_InvKinBase::SetGoalFrame(). Here is the call graph for this function: 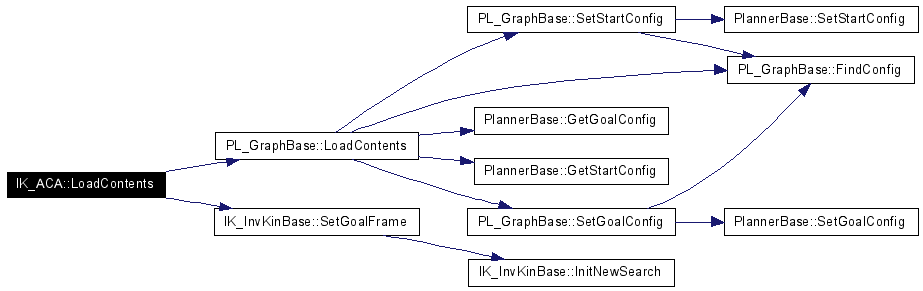 |
|
||||||||||||
|
Definition at line 1075 of file IK_ACA.cpp. References VectorN::clear(), PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), FindJointAdjust(), IK_InvKinBase::GetToolFrame(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and CD_BasicStyle::JointWraps(). Referenced by Search(). Here is the call graph for this function: 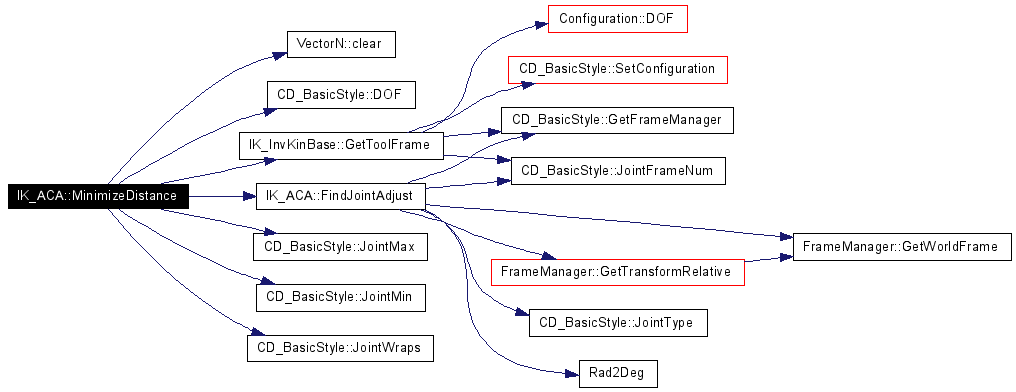 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 184 of file IK_ACA.cpp. References bestPath, PL_GraphBase::ClearGraphPath(), ComputePath(), Explore(), FAIL, PL_GraphBase::G, PlannerBase::GetStartConfig(), PL_GraphBase::goalNode, PlannerBase::guid, PL_GraphBase::IsInterfering(), Semaphore::Lock(), PASS, Search(), searchLandmark, searchPath, PL_GraphBase::startNode, PlannerBase::StartTimer(), and Semaphore::Unlock(). Here is the call graph for this function: 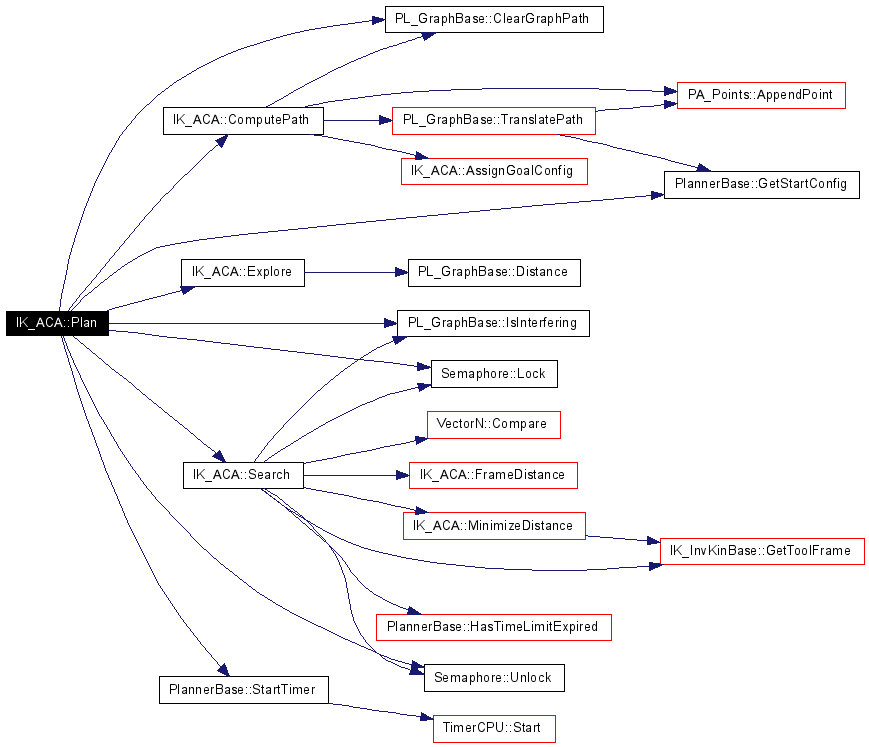 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 290 of file IK_ACA.cpp. References PL_GraphBase::Save(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 304 of file IK_ACA.cpp. References embryo, embryosPerLandmark, PL_GraphBase::G, IK_InvKinBase::GetGoalFrameVector(), and PL_GraphBase::SaveContents(). Here is the call graph for this function: 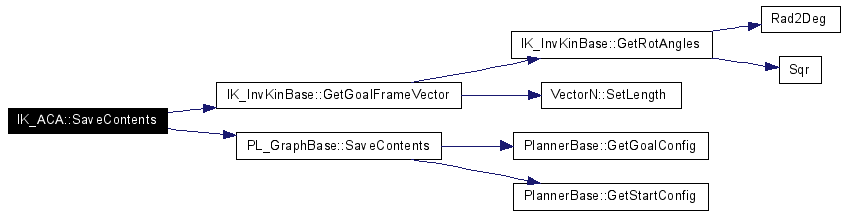 |
|
|
Definition at line 659 of file IK_ACA.cpp. References bestDistance_sq, bestLandmark, bestPath, VectorN::Compare(), DEFAULT_TOL, DEFAULT_TOL1, FAIL, FrameDistance(), PL_GraphBase::G, IK_InvKinBase::GetToolFrame(), IK_InvKinBase::goalFrame, PlannerBase::guid, PlannerBase::HasTimeLimitExpired(), PL_GraphBase::IsInterfering(), Semaphore::Lock(), MinimizeDistance(), PASS, searchPath, and Semaphore::Unlock(). Referenced by Plan(). Here is the call graph for this function: 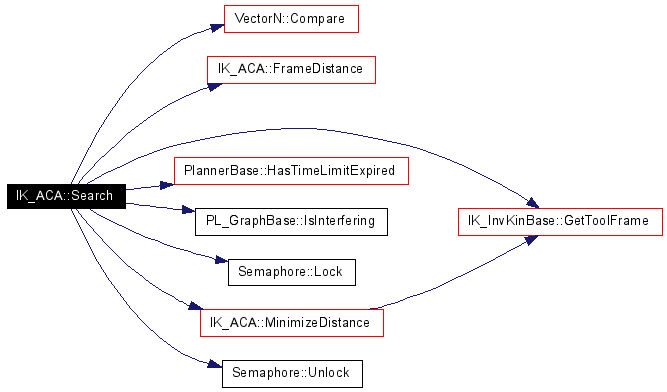 |
|
|
Definition at line 738 of file IK_ACA.cpp. References bestDistance_sq, bestLandmark, bestPath, PL_HasCollisionDetector::collisionDetector, DEFAULT_TOL, DEFAULT_TOL1, Configuration::DOF(), FAIL, FrameDistance(), PL_GraphBase::G, GetNextConfig(), IK_InvKinBase::GetToolFrame(), IK_InvKinBase::goalFrame, PlannerBase::guid, PlannerBase::HasTimeLimitExpired(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), Semaphore::Lock(), PASS, searchPath, and Semaphore::Unlock(). Here is the call graph for this function: 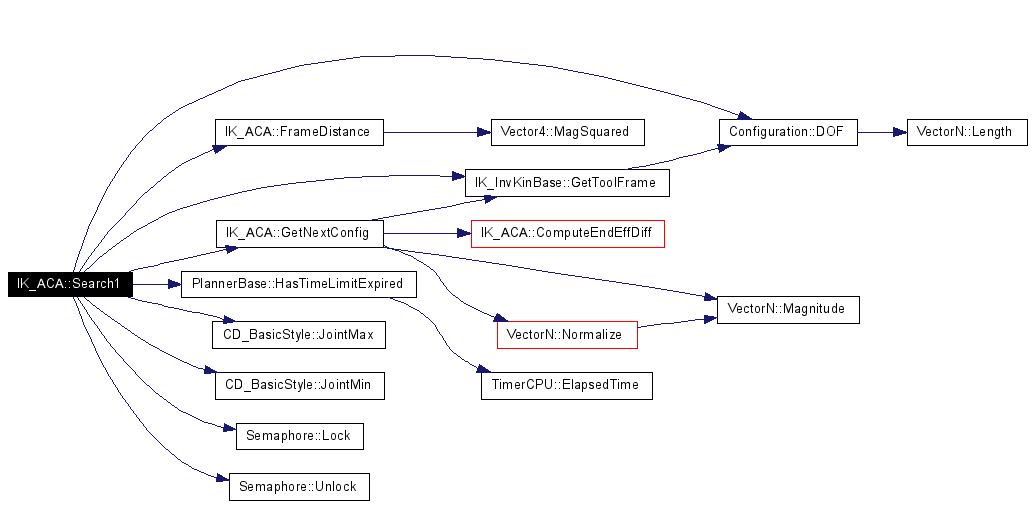 |
|
|
Reimplemented from PlannerBase. Definition at line 891 of file IK_ACA.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::GetRobot(), jacobian, and PL_GraphBase::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function:  |
|
|
Definition at line 1211 of file IK_ACA.cpp. References embryo, embryosPerLandmark, and PL_GraphBase::G. Referenced by CopySettings(). |
|
|
Reimplemented from PL_GraphBase. Definition at line 458 of file IK_ACA.cpp. References PlannerBase::GetGoalConfig(), and PlannerBase::SetGoalConfig(). Referenced by InitNewSearch(). Here is the call graph for this function: 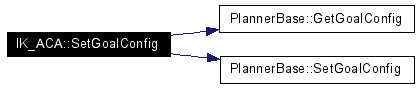 |
|
|
Reimplemented from PL_GraphBase. Definition at line 423 of file IK_ACA.cpp. References PL_GraphBase::ClearGraph(), CreateEmbryos(), PlannerBase::GetStartConfig(), InitNewSearch(), searchPath, PL_GraphBase::SetStartConfig(), and PL_GraphBase::startNode. Here is the call graph for this function: 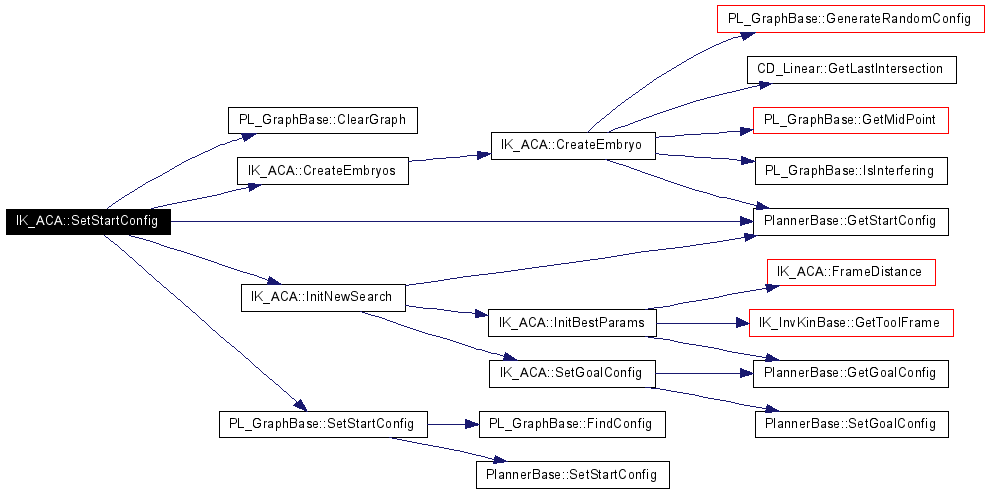 |
|
|
Definition at line 137 of file IK_ACA.h. Referenced by InitBestParams(), Search(), and Search1(). |
|
|
Definition at line 135 of file IK_ACA.h. Referenced by InitBestParams(), Search(), and Search1(). |
|
|
Definition at line 136 of file IK_ACA.h. Referenced by InitBestParams(), Plan(), Search(), and Search1(). |
|
|
Definition at line 124 of file IK_ACA.h. Referenced by AssignGoalConfig(), CreateEmbryo(), DrawSpecific(), Explore(), IK_ACA(), LoadContents(), SaveContents(), SetEmbryosPerLandmark(), and ~IK_ACA(). |
|
|
Definition at line 131 of file IK_ACA.h. Referenced by AssignGoalConfig(), CopySettings(), CreateEmbryos(), DrawSpecific(), Explore(), GetEmbryosPerLandmark(), IK_ACA(), LoadContents(), SaveContents(), and SetEmbryosPerLandmark(). |
|
|
Definition at line 139 of file IK_ACA.h. Referenced by SetCollisionDetector(). |
|
|
|
|
|
Definition at line 132 of file IK_ACA.h. Referenced by InitNewSearch(), and Plan(). |
|
|
Definition at line 127 of file IK_ACA.h. Referenced by Plan(), Search(), Search1(), and SetStartConfig(). |
 1.4.6-NO
1.4.6-NO