#include <planners/rangesensor/PL_Range_Sensor.h>
Inherits PL_Boolean_Output, and PL_OpenGL.
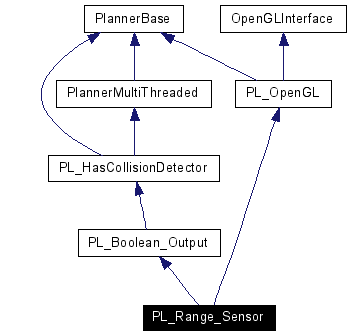
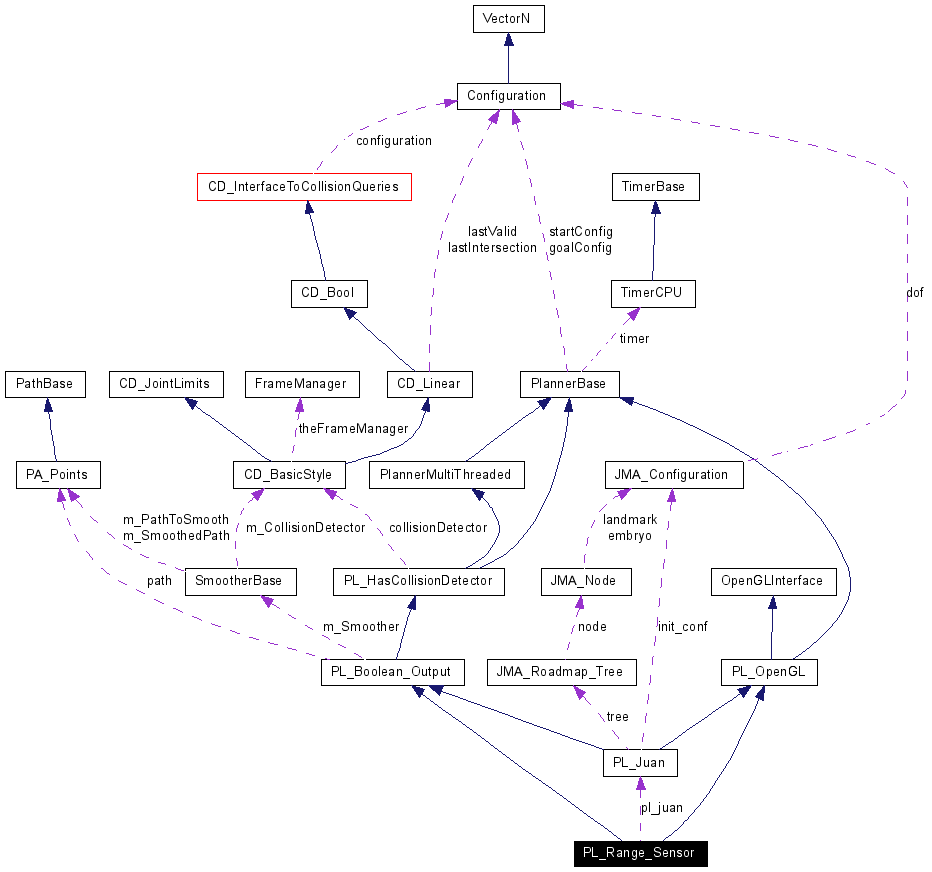
Inheritance diagram for PL_Range_Sensor:
Public Member Functions | |
| bool | DrawExplicit () const |
| virtual | ~PL_Range_Sensor () |
| bool | Plan () |
| virtual void | SetCollisionDetector (CD_BasicStyle *collisionDetector) |
Public Attributes | |
| bool | isMultiThreaded |
Protected Member Functions | |
| virtual void | SetStartConfig (const Configuration &configuration) |
| virtual void | SetGoalConfig (const Configuration &configuration) |
| Configuration | GenerateRandomConfig () const |
Protected Attributes | |
| PL_Juan | pl_juan |
Definition at line 12 of file PL_Range_Sensor.h.
|
|
Definition at line 7 of file PL_Range_Sensor.cpp. |
|
|
Reimplemented from PL_OpenGL. Definition at line 171 of file PL_Range_Sensor.cpp. References PL_HasCollisionDetector::collisionDetector, CD_Range_Sensor::dataFuser, Octree_Data_Fuser::GL_Display_Octree(), Semaphore::Lock(), and Semaphore::Unlock(). Here is the call graph for this function:  |
|
|
Definition at line 144 of file PL_Range_Sensor.cpp. References PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and VectorN::SetLength(). Here is the call graph for this function: 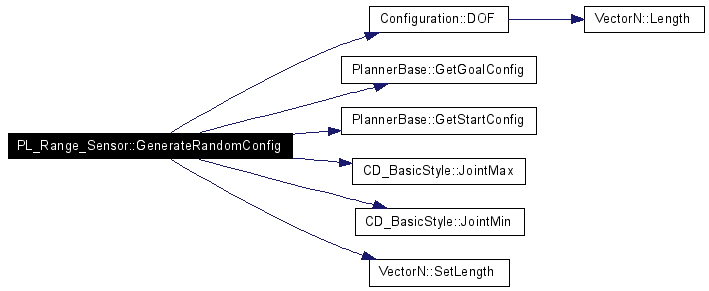 |
|
|
Implements PlannerBase. Definition at line 25 of file PL_Range_Sensor.cpp. References PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, PlannerBase::GetGoalConfig(), PL_Boolean_Output::GetPath(), PlannerBase::GetStartConfig(), PlannerBase::guid, isMultiThreaded, Semaphore::Lock(), PL_Boolean_Output::path, pl_juan, PL_Juan::Plan(), PlannerBase::SetTimeLimitInSeconds(), PlannerBase::StartTimer(), and Semaphore::Unlock(). Here is the call graph for this function: 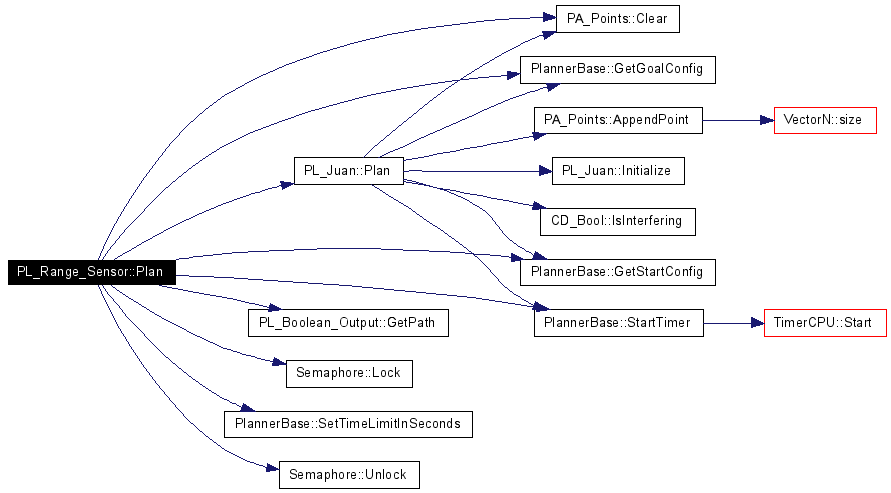 |
|
|
Reimplemented from PL_HasCollisionDetector. Definition at line 11 of file PL_Range_Sensor.cpp. References PL_HasCollisionDetector::collisionDetector, pl_juan, and PL_HasCollisionDetector::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function:  |
|
|
Reimplemented from PlannerBase. Definition at line 138 of file PL_Range_Sensor.cpp. References pl_juan, and PlannerBase::SetGoalConfig(). Here is the call graph for this function:  |
|
|
Reimplemented from PlannerBase. Definition at line 132 of file PL_Range_Sensor.cpp. References pl_juan, PL_Juan::SetStartConfig(), and PlannerBase::SetStartConfig(). Here is the call graph for this function: 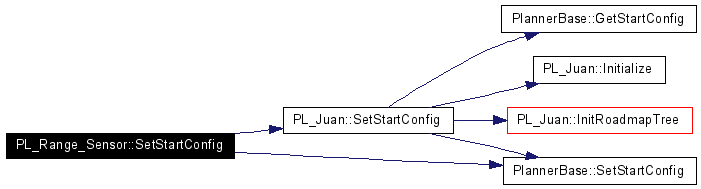 |
|
|
Definition at line 23 of file PL_Range_Sensor.h. Referenced by Plan(). |
|
|
Definition at line 35 of file PL_Range_Sensor.h. Referenced by Plan(), SetCollisionDetector(), SetGoalConfig(), and SetStartConfig(). |
 1.4.6-NO
1.4.6-NO