#include <planners/aca/PL_Juan.h>
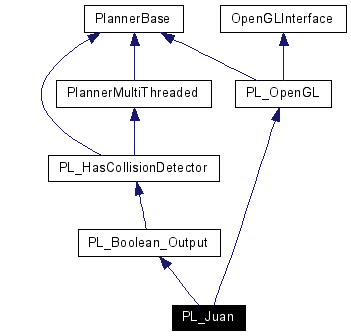
Inherits PL_Boolean_Output, and PL_OpenGL.
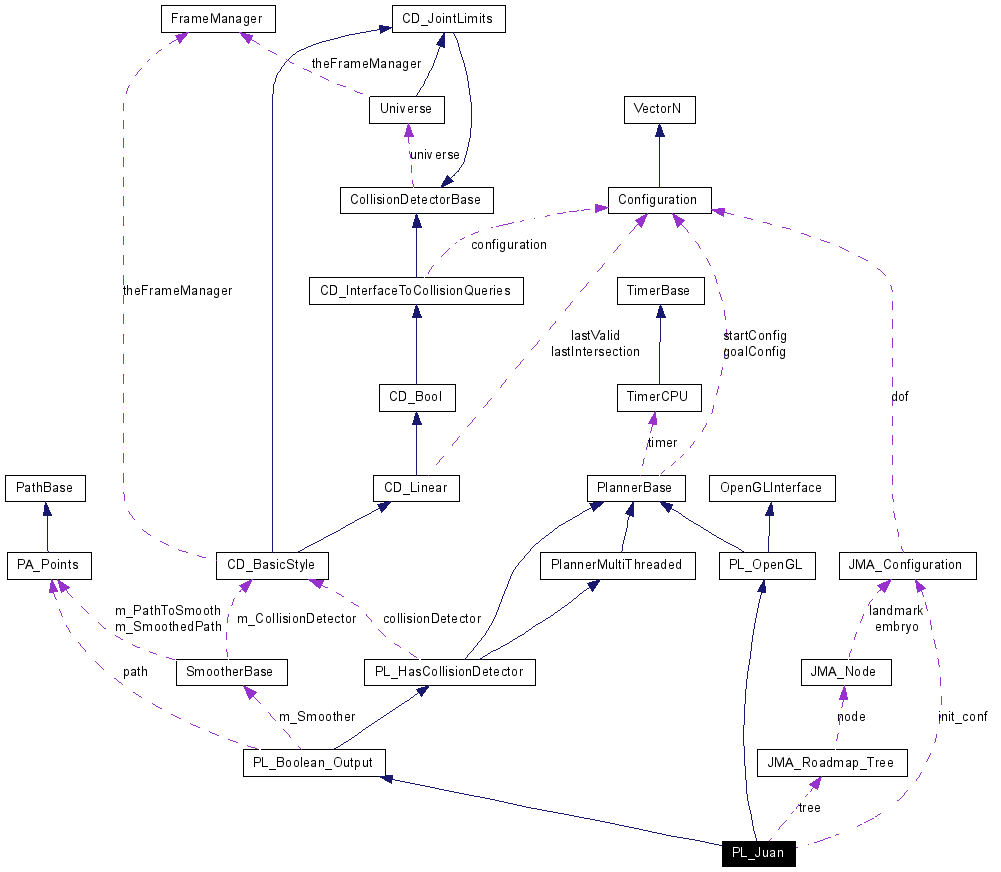
Inheritance diagram for PL_Juan:
Public Member Functions | |
| PL_Juan () | |
| virtual | ~PL_Juan () |
| virtual bool | Plan () |
| virtual bool | Save (const char *filename) const |
| virtual void | SetStartConfig (const Configuration &configuration) |
| virtual bool | Load (const char *filename) |
| virtual bool | DrawExplicit () const |
Protected Member Functions | |
| void | Initialize () |
| double | MyDistanceFunc (const Configuration &conf1, const Configuration &conf2) const |
| int | MyRandomPath (int id_landmark, const int id_embryo, const int n_dof, const JMA_Configuration init_conf, JMA_Configuration *embryo) const |
| int | SimplifyIdsTrajectory (const JMA_Roadmap_Tree *tree, const int list[], int n_nodes, int new_list[], int *new_n_nodes) const |
| int | Search (JMA_Roadmap_Tree *tree) const |
| int | MyLocalPlanner (const Configuration &start_conf, Configuration &local_minima) const |
| int | MyGoalFunc (const Configuration &config) const |
| int | MyPtpCollision (const Configuration &start_conf, const Configuration &local_minima) const |
| void | InitRoadmapTree (JMA_Roadmap_Tree *tree, const int n_dof, const int n_embryos, const JMA_Configuration init_conf) const |
| void | Explore (JMA_Roadmap_Tree *tree) const |
| void | GenerateNewEmbryo (JMA_Roadmap_Tree *tree, const int id_landmark, const int id_embryo) const |
| void | UpdateRoadmapTree (JMA_Roadmap_Tree *tree) const |
| void | ComputeEmbryoDistance (JMA_Roadmap_Tree *tree, JMA_Configuration *embryo) const |
| void | CopyTrajectoryToPath () |
Static Protected Member Functions | |
| static int | GetNAncestors (const JMA_Roadmap_Tree *tree, const int landmark_id) |
| static void | GetIdsPath (const JMA_Roadmap_Tree *tree, const int landmark_id, int list_ids[], int *n_landmarks) |
Private Attributes | |
| int | ids_list [500] |
| JMA_Roadmap_Tree * | tree |
| JMA_Configuration | init_conf |
| int | numberOfEmbryos |
| int | numberOfLandmarks |
| bool | m_Initialized: 1 |
Definition at line 9 of file PL_Juan.h.
|
|
Definition at line 48 of file PL_Juan.cpp. |
|
|
Definition at line 57 of file PL_Juan.cpp. References tree. |
|
||||||||||||
|
Definition at line 464 of file PL_Juan.cpp. References BIG_NUMBER, and MyDistanceFunc(). Referenced by GenerateNewEmbryo(). Here is the call graph for this function: 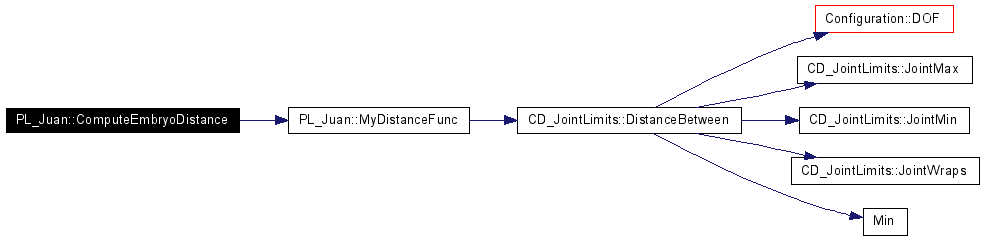 |
|
|
Definition at line 483 of file PL_Juan.cpp. |
|
|
Reimplemented from PL_OpenGL. Definition at line 662 of file PL_Juan.cpp. References JMA_Configuration::dof, Configuration::DOF(), PlannerBase::GetGoalConfig(), JMA_Node::landmark, Semaphore::Lock(), JMA_Roadmap_Tree::n_nodes, JMA_Roadmap_Tree::node, and tree. Here is the call graph for this function: 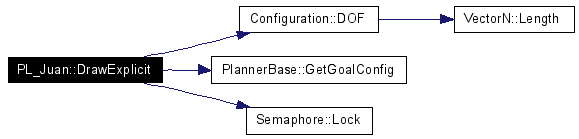 |
|
|
Definition at line 369 of file PL_Juan.cpp. References JMA_Roadmap_Tree::best_father_id, GenerateNewEmbryo(), JMA_Roadmap_Tree::n_nodes, NUMBER_OF_EMBRYOS, tree, and UpdateRoadmapTree(). Here is the call graph for this function: 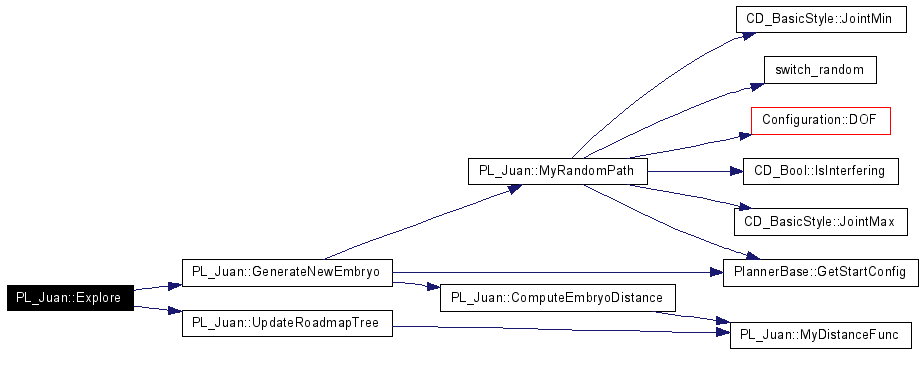 |
|
||||||||||||||||
|
Definition at line 397 of file PL_Juan.cpp. References ComputeEmbryoDistance(), PlannerBase::GetStartConfig(), MyRandomPath(), and tree. Referenced by Explore(), and InitRoadmapTree(). Here is the call graph for this function: 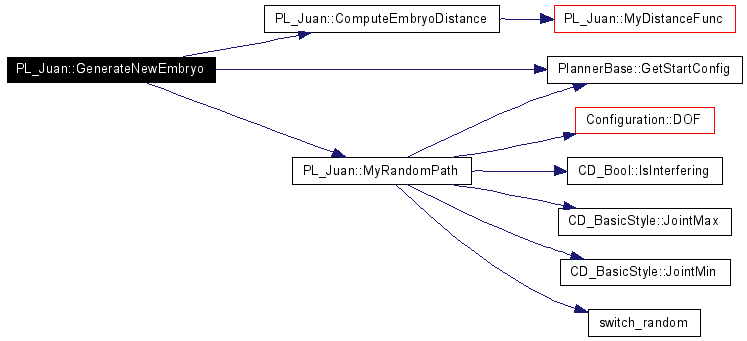 |
|
||||||||||||||||||||
|
Definition at line 409 of file PL_Juan.cpp. References JMA_Roadmap_Tree::best_father_id, JMA_Node::father_id, GetNAncestors(), JMA_Roadmap_Tree::n_nodes, JMA_Roadmap_Tree::node, and tree. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 251 of file PL_Juan.cpp. References JMA_Node::father_id, IJG_Assert, JMA_Roadmap_Tree::n_nodes, JMA_Roadmap_Tree::node, and tree. Referenced by GetIdsPath(). |
|
|
Definition at line 66 of file PL_Juan.cpp. References m_Initialized, and tree. Referenced by Plan(), and SetStartConfig(). |
|
||||||||||||||||||||
|
Definition at line 338 of file PL_Juan.cpp. References JMA_Roadmap_Tree::best_embryo_id, JMA_Roadmap_Tree::best_father_id, JMA_Configuration::dist, JMA_Configuration::dof, JMA_Node::embryo, JMA_Node::father_id, GenerateNewEmbryo(), init_conf, JMA_Node::landmark, JMA_Roadmap_Tree::last_max_dist, JMA_Roadmap_Tree::max_dist, JMA_Roadmap_Tree::N_dof, JMA_Node::N_embryos, JMA_Roadmap_Tree::n_nodes, NIL, JMA_Roadmap_Tree::node, and tree. Referenced by SetStartConfig(). Here is the call graph for this function: 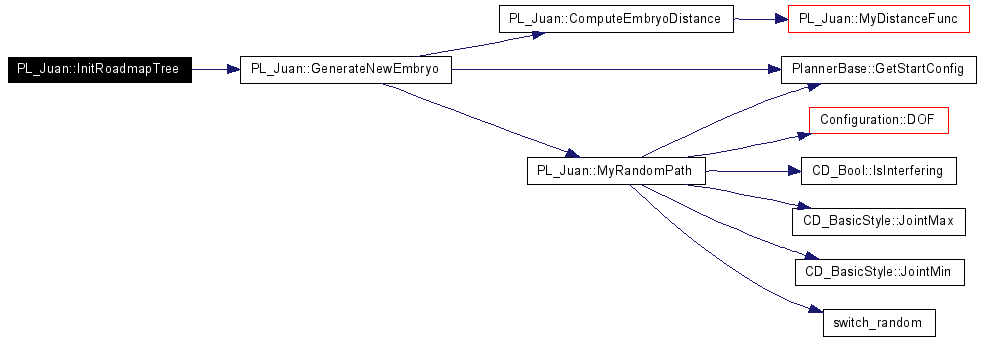 |
|
|
Reimplemented from PlannerBase. Definition at line 575 of file PL_Juan.cpp. References JMA_Roadmap_Tree::best_embryo_id, JMA_Roadmap_Tree::best_father_id, JMA_Roadmap_Tree::last_max_dist, Semaphore::Lock(), JMA_Roadmap_Tree::max_dist, JMA_Roadmap_Tree::N_dof, JMA_Roadmap_Tree::n_nodes, JMA_Roadmap_Tree::node, tree, and Semaphore::Unlock(). Here is the call graph for this function: 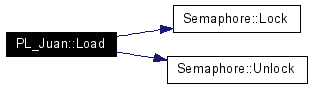 |
|
||||||||||||
|
Definition at line 177 of file PL_Juan.cpp. References PL_HasCollisionDetector::collisionDetector, and CD_JointLimits::DistanceBetween(). Referenced by ComputeEmbryoDistance(), and UpdateRoadmapTree(). Here is the call graph for this function: 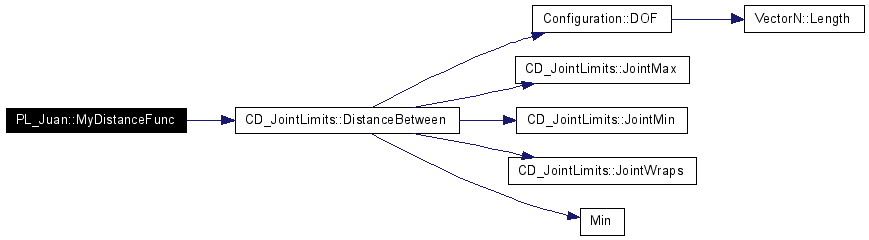 |
|
|
Definition at line 301 of file PL_Juan.cpp. References PlannerBase::GetGoalConfig(), and TRUE. Referenced by Search(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 283 of file PL_Juan.cpp. References FALSE, PlannerBase::GetGoalConfig(), and MyPtpCollision(). Referenced by Search(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 313 of file PL_Juan.cpp. References PL_HasCollisionDetector::collisionDetector, and CD_Linear::IsInterferingLinear(). Referenced by MyLocalPlanner(), and SimplifyIdsTrajectory(). Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Definition at line 184 of file PL_Juan.cpp. References BIGEST_RND_NUMBER, PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), JMA_Configuration::dof, PlannerBase::GetStartConfig(), init_conf, CD_Bool::IsInterfering(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and switch_random(). Referenced by GenerateNewEmbryo(). Here is the call graph for this function: 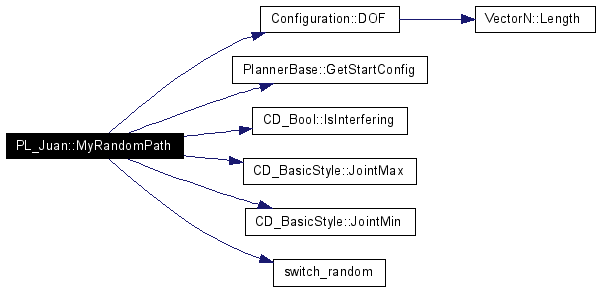 |
|
|
Implements PlannerBase. Definition at line 76 of file PL_Juan.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), Initialize(), CD_Bool::IsInterfering(), PL_Boolean_Output::path, and PlannerBase::StartTimer(). Referenced by PL_Range_Sensor::Plan(). Here is the call graph for this function: 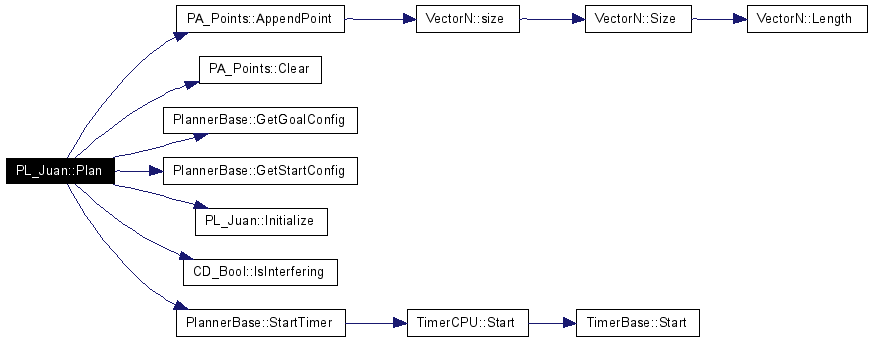 |
|
|
Reimplemented from PlannerBase. Definition at line 505 of file PL_Juan.cpp. References JMA_Roadmap_Tree::best_embryo_id, JMA_Roadmap_Tree::best_father_id, JMA_Roadmap_Tree::last_max_dist, JMA_Roadmap_Tree::max_dist, JMA_Roadmap_Tree::N_dof, JMA_Roadmap_Tree::n_nodes, JMA_Roadmap_Tree::node, and tree. |
|
|
Definition at line 271 of file PL_Juan.cpp. References MyGoalFunc(), and MyLocalPlanner(). Here is the call graph for this function:  |
|
|
Reimplemented from PlannerBase. Definition at line 562 of file PL_Juan.cpp. References JMA_Configuration::dist, JMA_Configuration::dof, PlannerBase::GetStartConfig(), init_conf, Initialize(), InitRoadmapTree(), MAX_EMBRYOS, PlannerBase::SetStartConfig(), and tree. Referenced by PL_Range_Sensor::SetStartConfig(). Here is the call graph for this function: 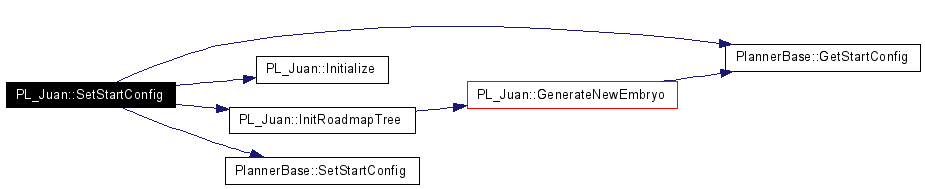 |
|
||||||||||||||||||||||||
|
Definition at line 214 of file PL_Juan.cpp. References FALSE, MyPtpCollision(), and TRUE. Here is the call graph for this function:  |
|
|
Definition at line 431 of file PL_Juan.cpp. References MyDistanceFunc(). Referenced by Explore(). Here is the call graph for this function:  |
|
|
|
|
|
Definition at line 42 of file PL_Juan.h. Referenced by InitRoadmapTree(), MyRandomPath(), and SetStartConfig(). |
|
|
Definition at line 45 of file PL_Juan.h. Referenced by Initialize(). |
|
|
|
|
|
|
|
|
Definition at line 41 of file PL_Juan.h. Referenced by DrawExplicit(), Explore(), GenerateNewEmbryo(), GetIdsPath(), GetNAncestors(), Initialize(), InitRoadmapTree(), Load(), Save(), SetStartConfig(), and ~PL_Juan(). |
 1.4.6-NO
1.4.6-NO