#include <collisiondetectors/CD_rangesensor/CD_Range_Sensor.h>
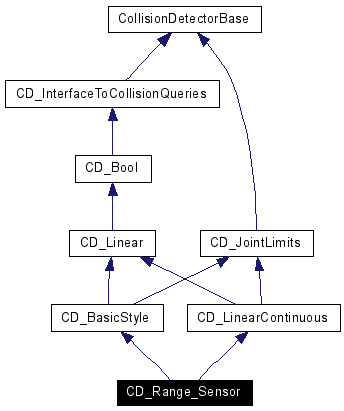
Inherits CD_BasicStyle, and CD_LinearContinuous.
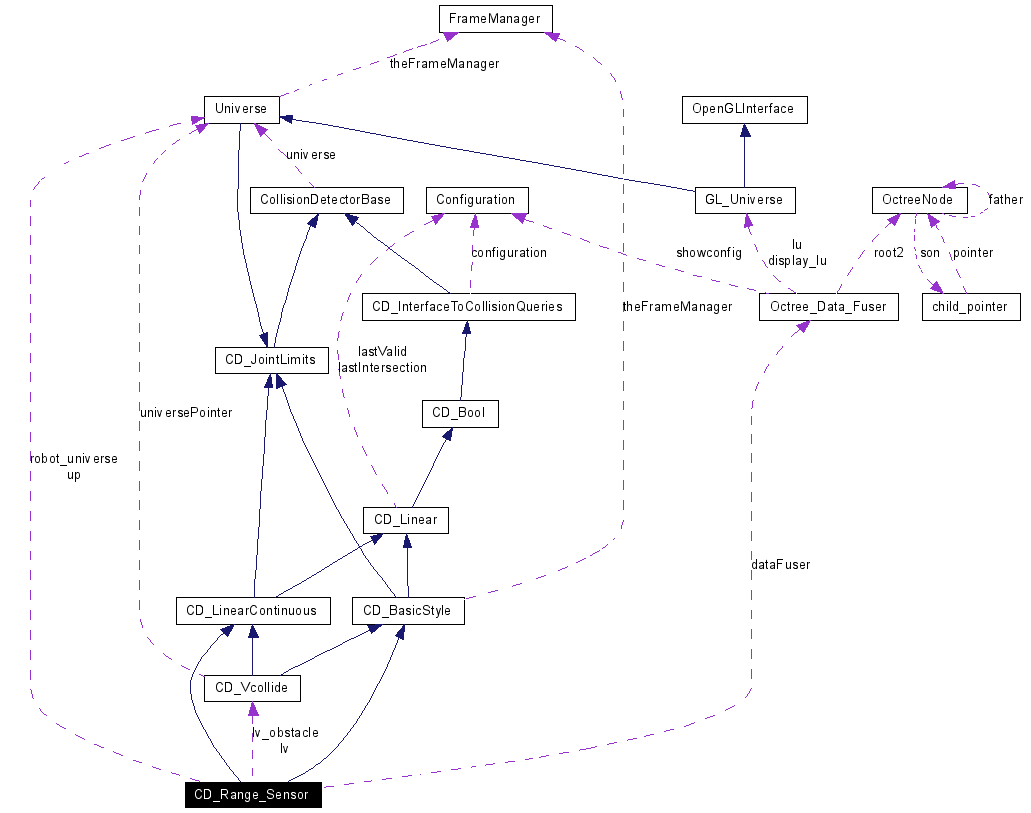
Inheritance diagram for CD_Range_Sensor:
Public Member Functions | |
| CD_Range_Sensor (Universe &universe) | |
| CD_Range_Sensor (const CD_Range_Sensor &right) | |
| virtual | ~CD_Range_Sensor () |
| void | GL_Display_Octree () |
| void | Take_Picture (Configuration newconfig) |
| CollisionDetectorBase * | Clone () const |
| virtual bool | IsInterfering (const Configuration &config) |
Public Attributes | |
| bool | isMultiThreaded |
| Octree_Data_Fuser | dataFuser |
Protected Member Functions | |
| Range_Sensor * | FindFirstCamera (Entity *entity) |
Protected Attributes | |
| bool | savetofile |
| Universe | robot_universe |
| Universe * | up |
| std::vector< Entity * > | allorigEntities |
| CD_Vcollide * | lv |
| CD_Vcollide * | lv_obstacle |
Definition at line 18 of file CD_Range_Sensor.h.
|
|
Definition at line 7 of file CD_Range_Sensor.cpp. References Octree_Data_Fuser::Add_Block(), CD_Range_Sensor_Octree_Filename, CD_Range_Sensor_Settings_Filename, dataFuser, eatwhite(), Octree_Data_Fuser::expected_facets, Octree_Data_Fuser::expected_squarevectors, Octree_Data_Fuser::expected_vertexes, isMultiThreaded, Octree_Data_Fuser::Load_State(), Octree_Data_Fuser::maxlevel, Octree_Data_Fuser::octree_display_mode, octree_nodisplay, savetofile, Octree_Data_Fuser::scalefactor, Octree_Data_Fuser::track_sensed_obstacles, CollisionDetectorBase::universe, up, cubic::x0, cubic::x1, cubic::y0, cubic::y1, cubic::z0, and cubic::z1. Referenced by Clone(). Here is the call graph for this function: 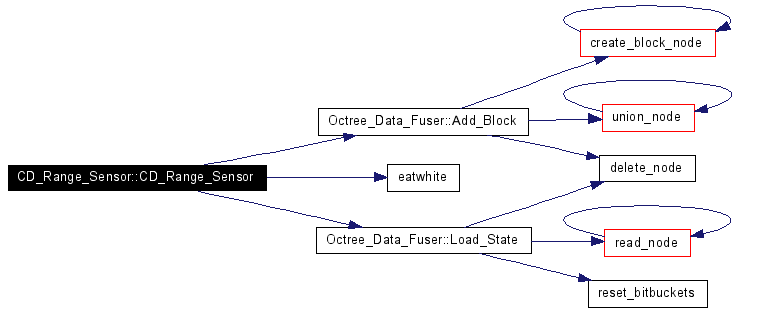 |
|
|
Definition at line 168 of file CD_Range_Sensor.cpp. References Universe::AddEntity(), allorigEntities, Clone(), CD_Vcollide::Clone(), dataFuser, Universe::Empty(), Universe::GetAllEntities(), isMultiThreaded, lv, lv_obstacle, robot_universe, and savetofile. Here is the call graph for this function: 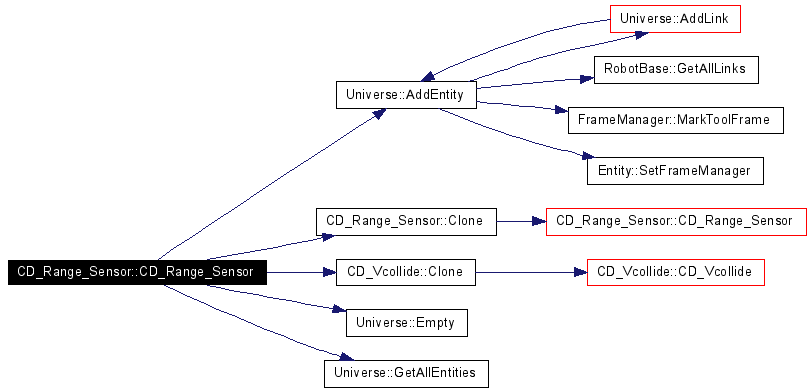 |
|
|
Definition at line 222 of file CD_Range_Sensor.cpp. References allorigEntities, lv, and lv_obstacle. |
|
|
Implements CD_BasicStyle. Definition at line 214 of file CD_Range_Sensor.cpp. References CD_Range_Sensor(). Referenced by CD_Range_Sensor(). Here is the call graph for this function: 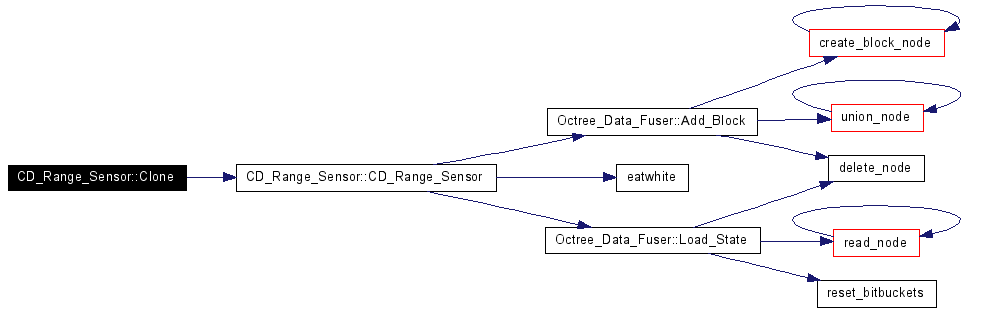 |
|
|
Definition at line 234 of file CD_Range_Sensor.cpp. References ObjectGroup::Size(). Referenced by Take_Picture(). Here is the call graph for this function:  |
|
|
|
|
|
Implements CD_Bool. Definition at line 318 of file CD_Range_Sensor.cpp. References CD_Vcollide::IsInterfering(), lv, and lv_obstacle. Here is the call graph for this function:  |
|
|
Definition at line 267 of file CD_Range_Sensor.cpp. References allorigEntities, FindFirstCamera(), Universe::GetConfiguration(), lv, lv_obstacle, Universe::SetConfiguration(), and up. Here is the call graph for this function:  |
|
|
Definition at line 66 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(), Take_Picture(), and ~CD_Range_Sensor(). |
|
|
Definition at line 38 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(), and PL_Range_Sensor::DrawExplicit(). |
|
|
Definition at line 36 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(). |
|
|
Definition at line 68 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(), IsInterfering(), Take_Picture(), and ~CD_Range_Sensor(). |
|
|
Definition at line 70 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(), IsInterfering(), Take_Picture(), and ~CD_Range_Sensor(). |
|
|
Definition at line 59 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(). |
|
|
Definition at line 57 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(). |
|
|
Definition at line 61 of file CD_Range_Sensor.h. Referenced by CD_Range_Sensor(), and Take_Picture(). |
 1.4.6-NO
1.4.6-NO