#include <planners/rrt/PL_RRT.h>
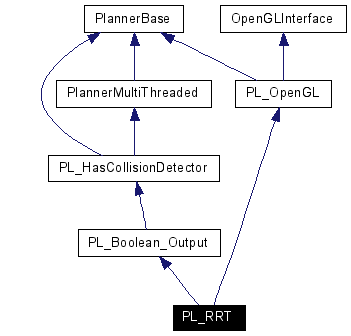
Inherits PL_Boolean_Output, and PL_OpenGL.
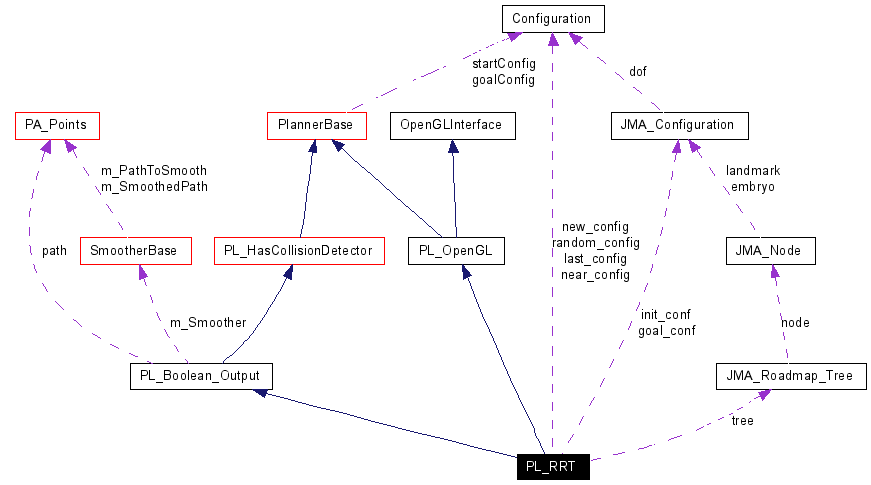
Inheritance diagram for PL_RRT:
Definition at line 12 of file PL_RRT.h.
|
|
Definition at line 23 of file PL_RRT.cpp. |
|
|
Reimplemented from PL_OpenGL. Definition at line 308 of file PL_RRT.cpp. References JMA_Configuration::dof, Configuration::DOF(), PlannerBase::GetGoalConfig(), JMA_Node::landmark, Semaphore::Lock(), JMA_Roadmap_Tree::n_nodes, JMA_Roadmap_Tree::node, and tree. Here is the call graph for this function: 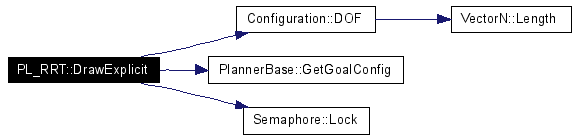 |
|
||||||||||||||||
|
Definition at line 186 of file PL_RRT.cpp. References PL_HasCollisionDetector::collisionDetector, Get_nearest_neighbour(), Get_new_config(), CD_Linear::IsInterferingLinear(), near_config, new_config, and random_config. Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 214 of file PL_RRT.cpp. References MyDistanceFunc(), and JMA_Roadmap_Tree::n_nodes. Referenced by Extend_trapped(). Here is the call graph for this function: 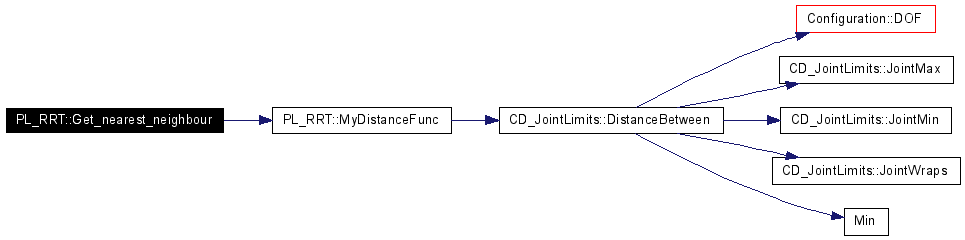 |
|
||||||||||||||||
|
Definition at line 233 of file PL_RRT.cpp. References MyDistanceFunc(). Referenced by Extend_trapped(). Here is the call graph for this function: 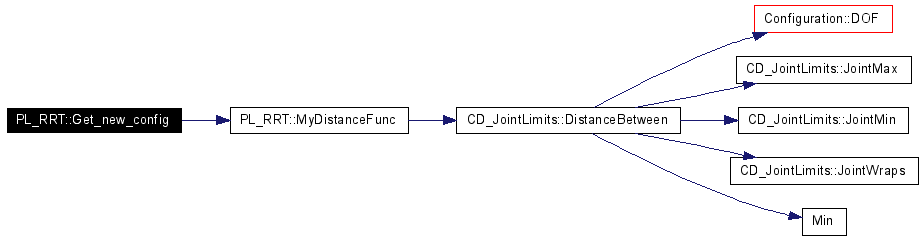 |
|
|
Definition at line 165 of file PL_RRT.cpp. References BIGEST_RND_NUMBER, PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), PlannerBase::GetStartConfig(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and switch_random(). Here is the call graph for this function: 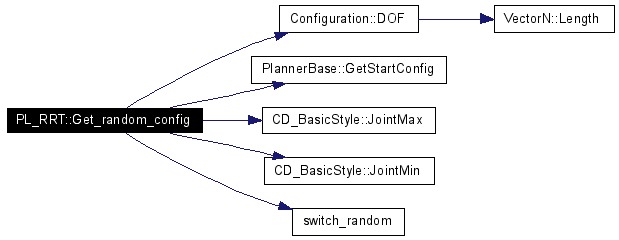 |
|
||||||||||||||||||||
|
Definition at line 277 of file PL_RRT.cpp. |
|
||||||||||||||||
|
Definition at line 257 of file PL_RRT.cpp. References JMA_Configuration::dist, JMA_Configuration::dof, init_conf, and NIL. Referenced by SetStart_and_GoalConfig(). |
|
||||||||||||
|
Definition at line 249 of file PL_RRT.cpp. References PL_HasCollisionDetector::collisionDetector, and CD_JointLimits::DistanceBetween(). Referenced by Get_nearest_neighbour(), and Get_new_config(). Here is the call graph for this function: 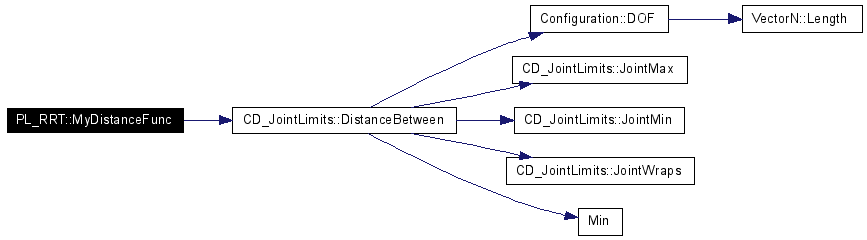 |
|
|
Implements PlannerBase. Definition at line 28 of file PL_RRT.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), CD_Bool::IsInterfering(), PL_Boolean_Output::path, and PlannerBase::StartTimer(). Here is the call graph for this function: 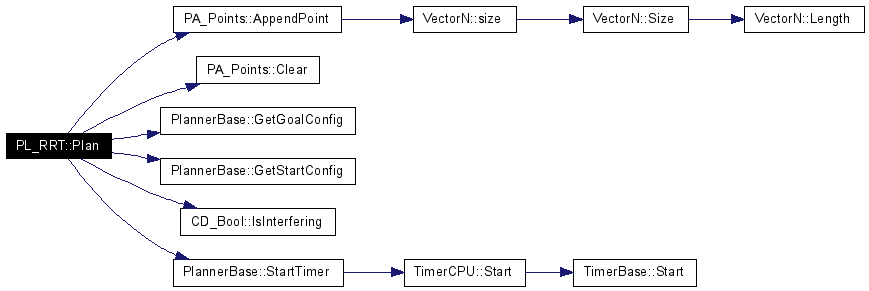 |
|
||||||||||||
|
Definition at line 298 of file PL_RRT.cpp. References JMA_Configuration::dist, JMA_Configuration::dof, PlannerBase::GetStartConfig(), goal_conf, init_conf, InitRoadmapTree(), and tree. Here is the call graph for this function:  |
|
|
Definition at line 38 of file PL_RRT.h. Referenced by SetStart_and_GoalConfig(). |
|
|
|
|
|
Definition at line 38 of file PL_RRT.h. Referenced by InitRoadmapTree(), and SetStart_and_GoalConfig(). |
|
|
|
|
|
Definition at line 41 of file PL_RRT.h. Referenced by Extend_trapped(). |
|
|
Definition at line 41 of file PL_RRT.h. Referenced by Extend_trapped(). |
|
|
|
|
|
|
|
|
Definition at line 41 of file PL_RRT.h. Referenced by Extend_trapped(). |
|
|
Definition at line 37 of file PL_RRT.h. Referenced by DrawExplicit(), and SetStart_and_GoalConfig(). |
 1.4.6-NO
1.4.6-NO