#include <server/ServerBase.h>
Inherited by Server.
Inheritance diagram for ServerBase:
Definition at line 25 of file ServerBase.h.
|
|
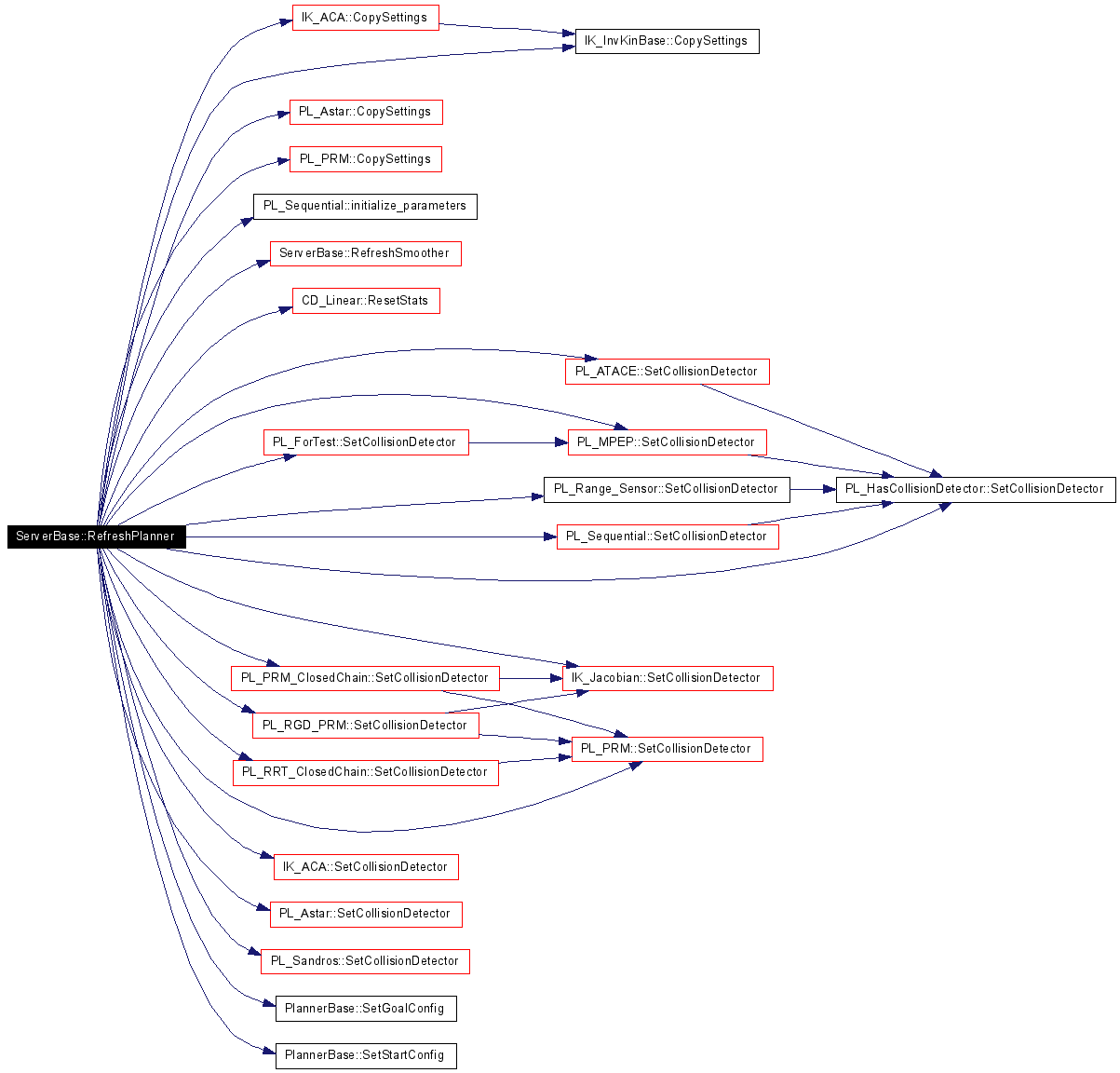
Definition at line 111 of file ServerBase.cpp. References CD_VCOLLIDE, filename, obstacleFilename, PLANNER_NONE, rootpath, SetCollisionDetector(), SetPlanner(), SetSmoother(), and SMOOTHER_NONE. Here is the call graph for this function: 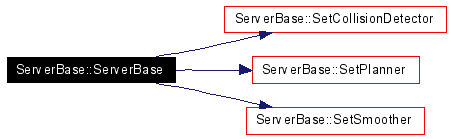 |
|
|
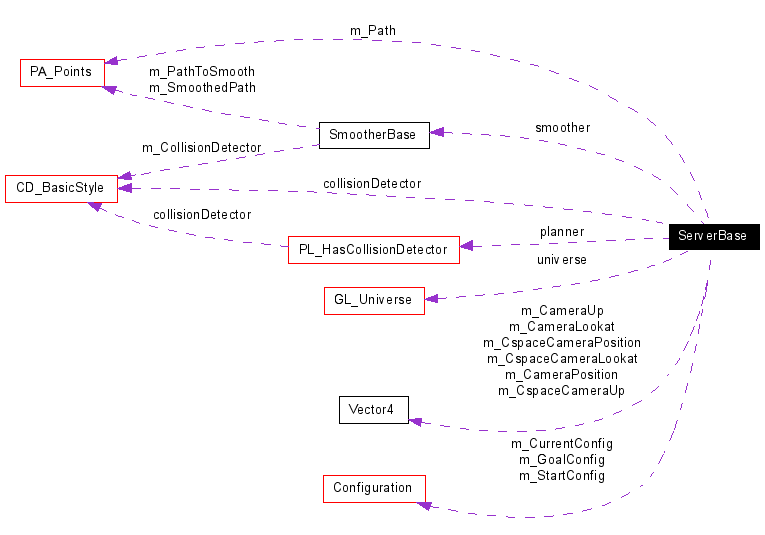
Definition at line 135 of file ServerBase.cpp. References collisionDetector, planner, and smoother. |
|
||||||||||||
|
Definition at line 1256 of file ServerBase.cpp. References Universe::AddEntity(), ObjectBase::Clone(), GetAbsoluteFileName(), GetMPKWorkingDirectory(), VRML_Reader::GetTheObject(), VRML_20_Reader::Read(), Entity::SetBaseFrame(), VRML_Reader::SetFilename(), ObjectBase::SetFrame(), Matrix4x4::Translate(), universe, and userObstacles. Here is the call graph for this function: 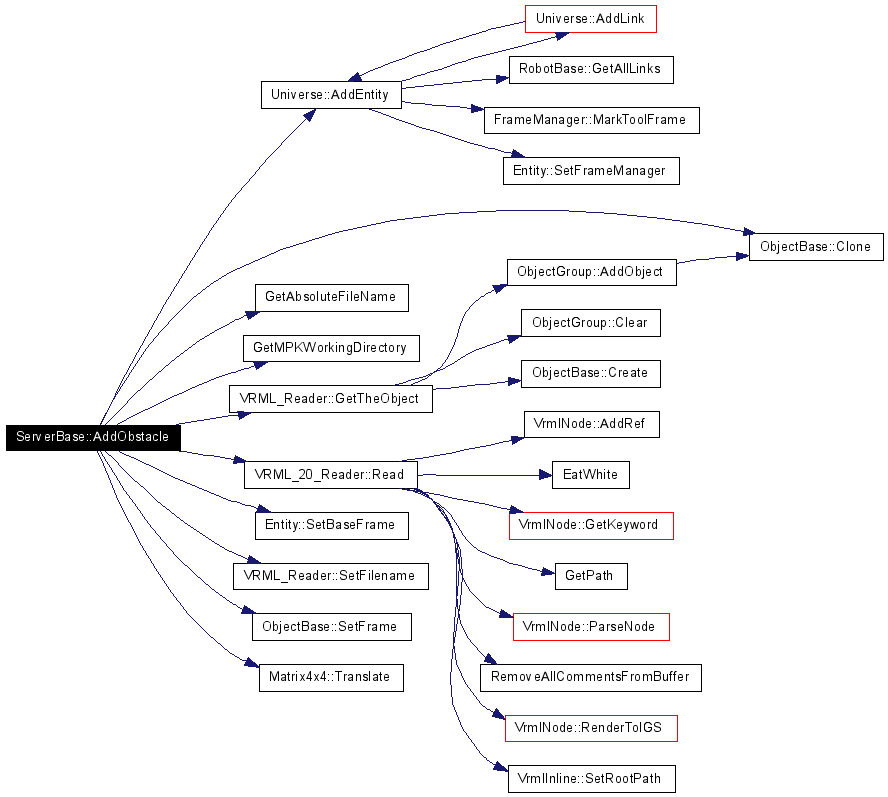 |
|
|
Definition at line 963 of file ServerBase.cpp. References collisionDetectorType. |
|
|
Definition at line 367 of file ServerBase.cpp. |
|
|
Definition at line 359 of file ServerBase.cpp. |
|
|
Definition at line 1186 of file ServerBase.cpp. References obstacleFilename. |
|
|
Definition at line 148 of file ServerBase.cpp. References PlannerBase::GetParameters(), and planner. Here is the call graph for this function:  |
|
|
Definition at line 877 of file ServerBase.cpp. References plannerType. |
|
|
Definition at line 350 of file ServerBase.cpp. References Universe::GetEntity(), and universe. Here is the call graph for this function:  |
|
|
Definition at line 1181 of file ServerBase.cpp. References filename. |
|
|
Definition at line 896 of file ServerBase.cpp. References smootherType. |
|
|
Definition at line 1305 of file ServerBase.cpp. |
|
|
Definition at line 977 of file ServerBase.cpp. References Configuration::DOF(), eatwhite(), Universe::Empty(), IfstreamWithComments::getline(), IJG_Assert, PlannerBase::Load(), m_CameraLookat, m_CameraPosition, m_CameraUp, m_CurrentConfig, m_GoalConfig, m_Path, m_StartConfig, IfstreamWithComments::open(), ParseCspaceCamera(), ParseGoalFrames(), ParseObstacleFile(), ParseRobotFile(), planner, RefreshCollisionDetector(), RefreshPlanner(), SetCollisionDetector(), PlannerBase::SetGoalConfig(), SetPlanner(), PlannerBase::SetStartConfig(), MPKstring::TrimTrailingWhitespace(), and universe. Here is the call graph for this function: 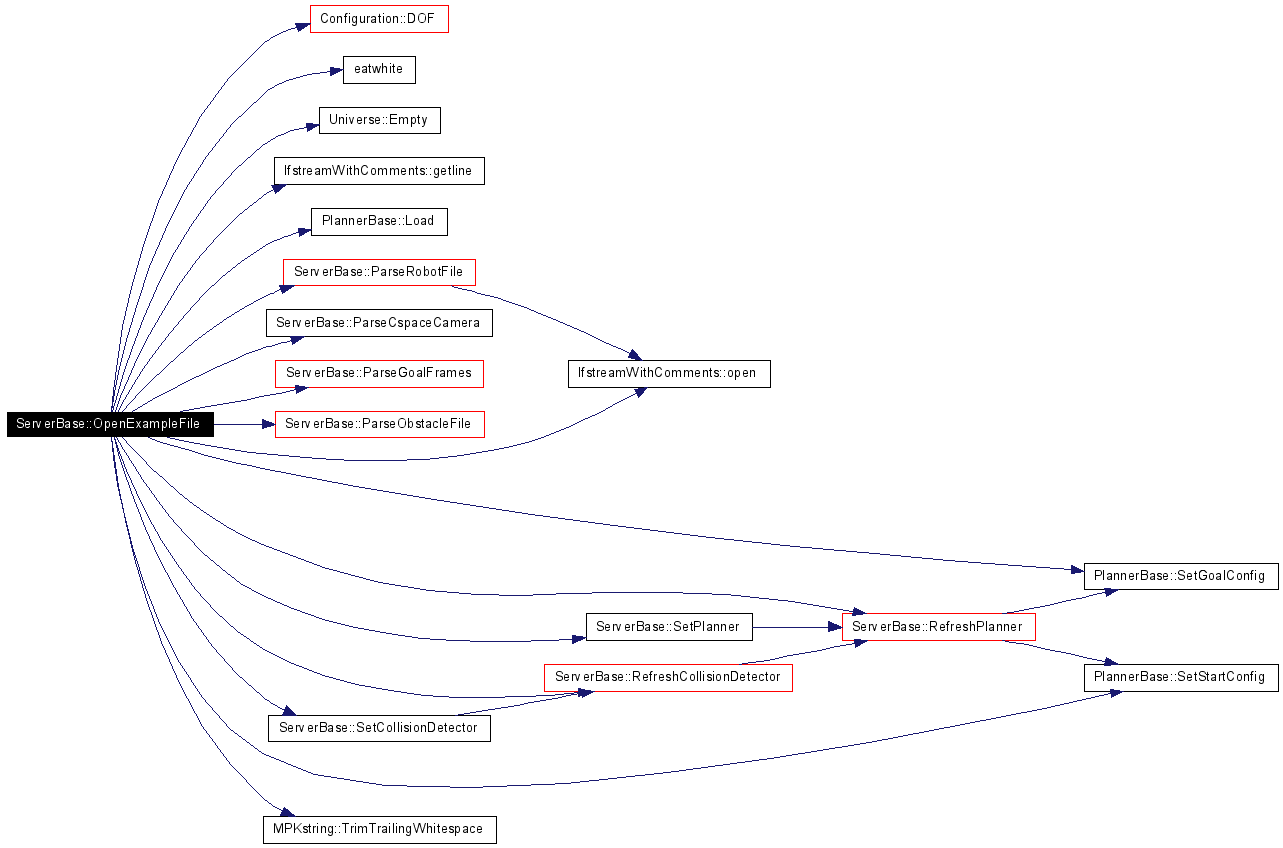 |
|
|
Definition at line 1194 of file ServerBase.cpp. References m_CspaceCameraLookat, m_CspaceCameraPosition, and m_CspaceCameraUp. Referenced by OpenExampleFile(). |
|
|
Definition at line 1204 of file ServerBase.cpp. References IJG_Assert, planner, and IK_InvKinBase::SetGoalFrame(). Referenced by OpenExampleFile(). Here is the call graph for this function:  |
|
|
Definition at line 227 of file ServerBase.cpp. References Universe::AddEntity(), ObjectBase::Clone(), GetAbsoluteFileName(), VRML_Reader::GetTheObject(), VRML_20_Reader::Read(), rootpath, VRML_Reader::SetFilename(), and universe. Referenced by OpenExampleFile(), and Server::SpecifyEnvironment(). Here is the call graph for this function: 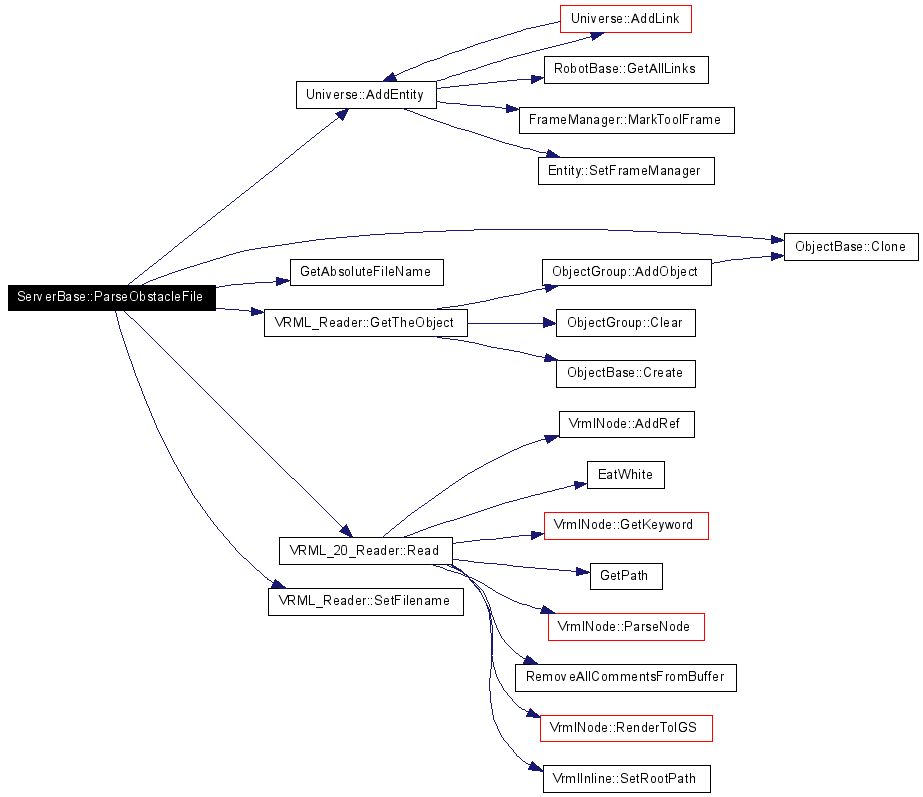 |
|
|
Definition at line 175 of file ServerBase.cpp. References GetAbsoluteFileName(), IJG_Assert, IJG_AssertMsg, IfstreamWithComments::open(), and rootpath. Referenced by OpenExampleFile(), R_ThreeCylinderRobot(), and RefreshRobotFile(). Here is the call graph for this function:  |
|
|
Definition at line 220 of file ServerBase.cpp. |
|
|
Definition at line 165 of file ServerBase.cpp. References Universe::Empty(), ParseRobotFile(), and universe. Referenced by Server::SpecifyRobot(). Here is the call graph for this function:  |
|
|
Definition at line 269 of file ServerBase.cpp. References CD_ICOLLIDE, CD_RANGE_SENSOR, CD_SIMPLE, CD_SOLID, CD_SWIFTPP, CD_VCOLLIDE, collisionDetector, collisionDetectorType, RobotBase::GetLink(), CD_BasicStyle::GetRobot(), RefreshPlanner(), and universe. Referenced by OpenExampleFile(), and SetCollisionDetector(). Here is the call graph for this function: 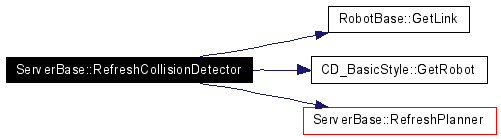 |
|
|
|
Definition at line 342 of file ServerBase.cpp. References Universe::Empty(), filename, ParseRobotFile(), and universe. Here is the call graph for this function:  |
|
|
Definition at line 906 of file ServerBase.cpp. References planner, PL_Boolean_Output::SetSmoother(), smoother, SMOOTHER_NONE, SMOOTHER_RANDOM_NODE_PAIR, SMOOTHER_SUCCESSIVE_AND_RANDOM, SMOOTHER_SUCCESSIVE_NODE_PAIR, and SMOOTHER_TRISECTION. Referenced by RefreshPlanner(), and SetSmoother(). Here is the call graph for this function:  |
|
|
Definition at line 1131 of file ServerBase.cpp. |
|
|
Definition at line 1284 of file ServerBase.cpp. |
|
|
Definition at line 256 of file ServerBase.cpp. References RefreshCollisionDetector(). Referenced by OpenExampleFile(), Server::Plan(), ServerBase(), and Server::SpecifyCollisionDetector(). Here is the call graph for this function:  |
|
|
Definition at line 1237 of file ServerBase.cpp. |
|
|
Definition at line 376 of file ServerBase.cpp. References RefreshPlanner(). Referenced by OpenExampleFile(), ServerBase(), and Server::SpecifyPlanner(). Here is the call graph for this function:  |
|
|
Definition at line 156 of file ServerBase.cpp. References planner, and PlannerBase::SetParameters(). Here is the call graph for this function:  |
|
|
Definition at line 1231 of file ServerBase.cpp. References rootpath. |
|
|
Definition at line 884 of file ServerBase.cpp. References RefreshSmoother(). Referenced by ServerBase(). Here is the call graph for this function:  |
|
|
Definition at line 111 of file ServerBase.h. Referenced by Server::Plan(), RefreshCollisionDetector(), RefreshPlanner(), Server::SpecifyCollisionDetector(), and ~ServerBase(). |
|
|
Definition at line 152 of file ServerBase.h. Referenced by GetCollisionDetectorType(), Server::Plan(), and RefreshCollisionDetector(). |
|
|
Definition at line 154 of file ServerBase.h. Referenced by GetRobotFilename(), RefreshRobotFile(), and ServerBase(). |
|
|
Definition at line 139 of file ServerBase.h. Referenced by OpenExampleFile(). |
|
|
Definition at line 138 of file ServerBase.h. Referenced by OpenExampleFile(). |
|
|
Definition at line 140 of file ServerBase.h. Referenced by OpenExampleFile(). |
|
|
Definition at line 142 of file ServerBase.h. Referenced by ParseCspaceCamera(). |
|
|
Definition at line 141 of file ServerBase.h. Referenced by ParseCspaceCamera(). |
|
|
Definition at line 143 of file ServerBase.h. Referenced by ParseCspaceCamera(). |
|
|
Definition at line 131 of file ServerBase.h. Referenced by Server::ConfigureRobot(), OpenExampleFile(), and Server::Server(). |
|
|
Definition at line 132 of file ServerBase.h. Referenced by Server::GoalConfig(), OpenExampleFile(), and Server::Plan(). |
|
|
Definition at line 144 of file ServerBase.h. Referenced by OpenExampleFile(). |
|
|
Definition at line 133 of file ServerBase.h. Referenced by OpenExampleFile(), Server::Plan(), Server::Server(), and Server::StartConfig(). |
|
|
Definition at line 156 of file ServerBase.h. Referenced by GetObstacleFilename(), and ServerBase(). |
|
|
Definition at line 117 of file ServerBase.h. Referenced by GetPlannerParameters(), OpenExampleFile(), ParseGoalFrames(), Server::Plan(), RefreshPlanner(), RefreshSmoother(), Server::SendPath(), SetPlannerParameters(), Server::SpecifyCollisionDetector(), and ~ServerBase(). |
|
|
Definition at line 157 of file ServerBase.h. Referenced by GetPlannerType(), and RefreshPlanner(). |
|
|
Definition at line 153 of file ServerBase.h. Referenced by Server::Plan(), and Server::SendPath(). |
|
|
Definition at line 155 of file ServerBase.h. Referenced by ParseObstacleFile(), ParseRobotFile(), ServerBase(), and SetRootPath(). |
|
|
Definition at line 119 of file ServerBase.h. Referenced by RefreshSmoother(), and ~ServerBase(). |
|
|
Definition at line 158 of file ServerBase.h. Referenced by GetSmootherType(). |
|
|
Definition at line 125 of file ServerBase.h. Referenced by AddObstacle(), GetRobot(), OpenExampleFile(), ParseObstacleFile(), R_ThreeCylinderRobot(), RefreshCollisionDetector(), and RefreshRobotFile(). |
|
|
Definition at line 161 of file ServerBase.h. Referenced by AddObstacle(). |
 1.4.6-NO
1.4.6-NO