#include <planners/fortest/PL_ForTest.h>
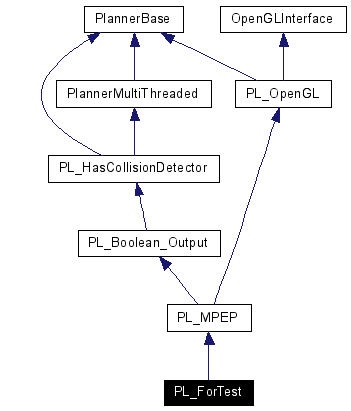
Inherits PL_MPEP.
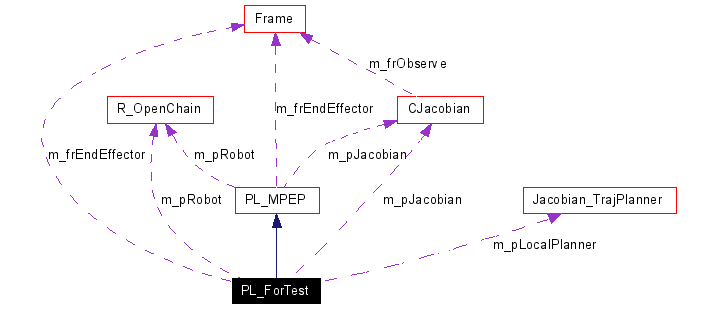
Inheritance diagram for PL_ForTest:
Definition at line 12 of file PL_ForTest.h.
|
|
Definition at line 14 of file PL_ForTest.cpp. References DEF_SMG_STEPSIZE, DEF_STEP_AHEAD, m_bUseBacktracking, m_bUseJacobianSMGExploration, m_bUseObstacleAvoidLP, m_nSMGNodes, m_nSMGraphs, m_nSMGStepSize, m_nStepAhead, m_pJacobian, m_pLocalPlanner, and PL_MPEP::smgNodeNum. |
|
|
Definition at line 27 of file PL_ForTest.cpp. References m_pJacobian, and m_pLocalPlanner. |
|
||||||||||||
|
Reimplemented from PL_MPEP. Definition at line 409 of file PL_ForTest.cpp. References DEF_ERROR_TOLERANCE, CJacobian::GetMatrix(), PL_MPEP::GetToolFrame(), Frame::GetTranslationVector(), Matrixmxn::Inverse(), m_frEndEffector, m_nDof, m_pJacobian, Vector4::Magnitude(), PL_MPEP::poses, Rad2Deg(), CJacobian::SetConfiguration(), and CJacobian::SetInterestPoint(). Referenced by Extend_Node_Self_Motion_Graph_Jacobian(), and FindLocalPath(). Here is the call graph for this function: 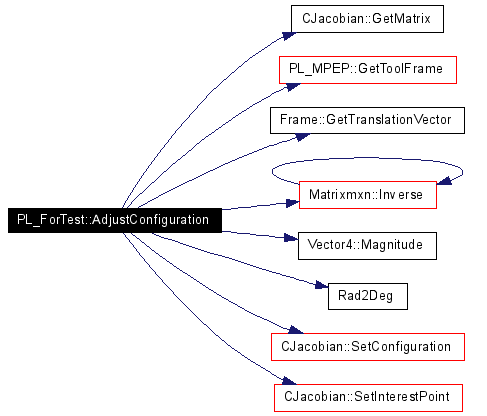 |
|
||||||||||||
|
Definition at line 450 of file PL_ForTest.cpp. References VectorN::SetLength(). Referenced by FindLocalPath(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_MPEP. Definition at line 37 of file PL_ForTest.cpp. References PL_MPEP::DrawExplicit(). Here is the call graph for this function: 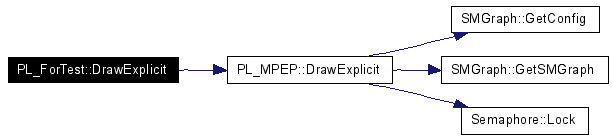 |
|
||||||||||||
|
Reimplemented from PL_MPEP. Definition at line 224 of file PL_ForTest.cpp. References Pose_Node::conf, ERROR_SMGRAPH_FULL, Pose_Node::graph, m_bUseBacktracking, m_nSMGraphs, SMGraph::Node_Num(), Pose_Node::poses, and PL_MPEP::smgNodeNum. Here is the call graph for this function:  |
|
||||||||||||
|
Reimplemented from PL_MPEP. Definition at line 263 of file PL_ForTest.cpp. References PL_HasCollisionDetector::collisionDetector, PL_MPEP::distTolerance, SMGraph::GetConfiguration(), CRedundant::GetConfigurationByActive(), PL_MPEP::GetConfigurationByDirection(), PL_MPEP::GetNearestNodeInGraph(), PL_MPEP::GetRandomConfiguration(), Pose_Node::graph, CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), Pose_Node::poses, PL_MPEP::poses, PL_MPEP::randomRetry, PL_MPEP::redundant, and PL_MPEP::tree. Here is the call graph for this function: 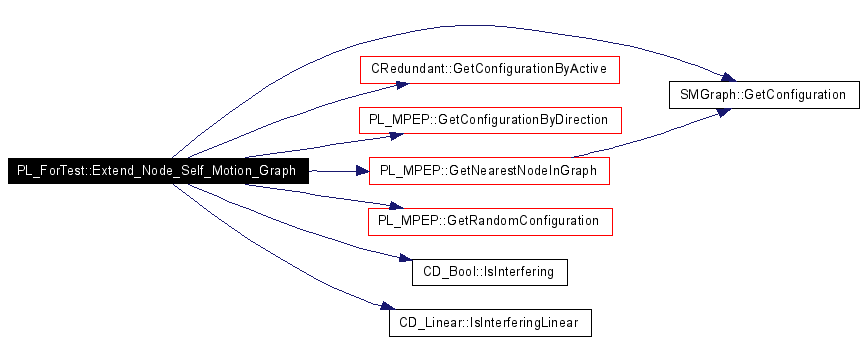 |
|
||||||||||||
|
Reimplemented from PL_MPEP. Definition at line 334 of file PL_ForTest.cpp. References AdjustConfiguration(), PL_HasCollisionDetector::collisionDetector, SMGraph::GetConfiguration(), CJacobian::GetMatrix(), PL_MPEP::GetNearestNodeInGraph(), PL_MPEP::GetRandomConfiguration(), Pose_Node::graph, Matrixmxn::Inverse(), CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), IsJointWithinLimits(), m_nDof, m_nSMGStepSize, m_pJacobian, Pose_Node::poses, PL_MPEP::randomRetry, and PL_MPEP::tree. Here is the call graph for this function: 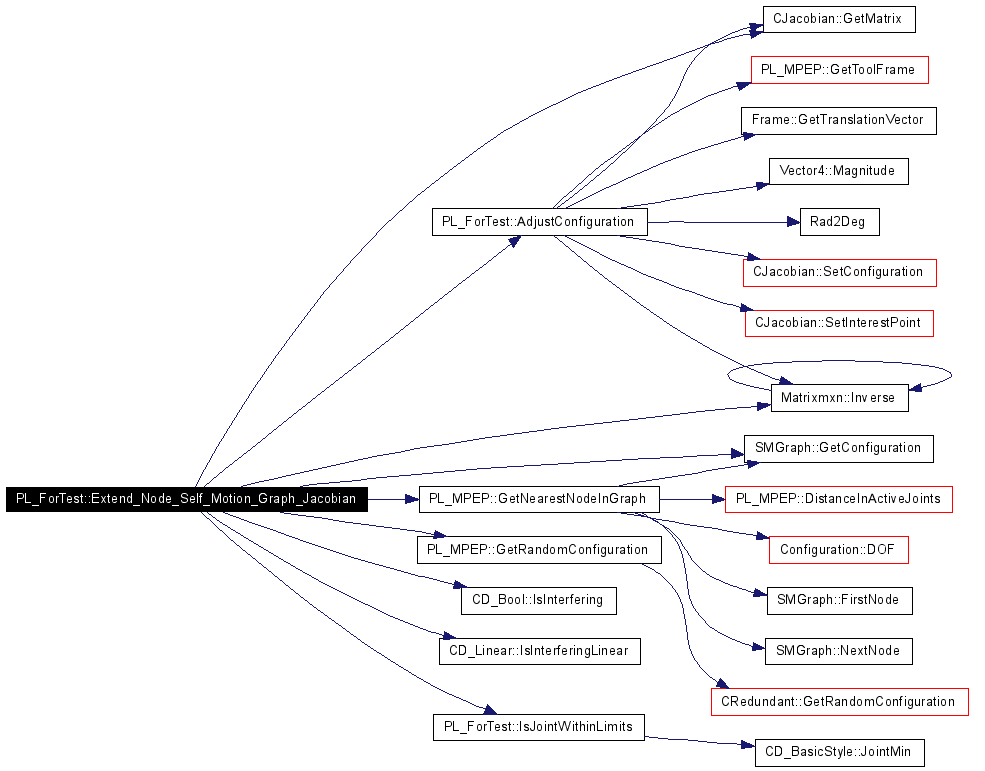 |
|
||||||||||||||||||||
|
Definition at line 470 of file PL_ForTest.cpp. References AdjustConfiguration(), PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, ComputeDeltaEndEff(), CJacobian::GetMatrix(), PL_MPEP::GetToolFrame(), Matrixmxn::Inverse(), CD_Linear::IsInterferingLinear(), IsJointWithinLimits(), m_frEndEffector, m_nDof, m_pJacobian, PL_MPEP::poses, Rad2Deg(), CJacobian::SetConfiguration(), and CJacobian::SetInterestPoint(). Here is the call graph for this function: 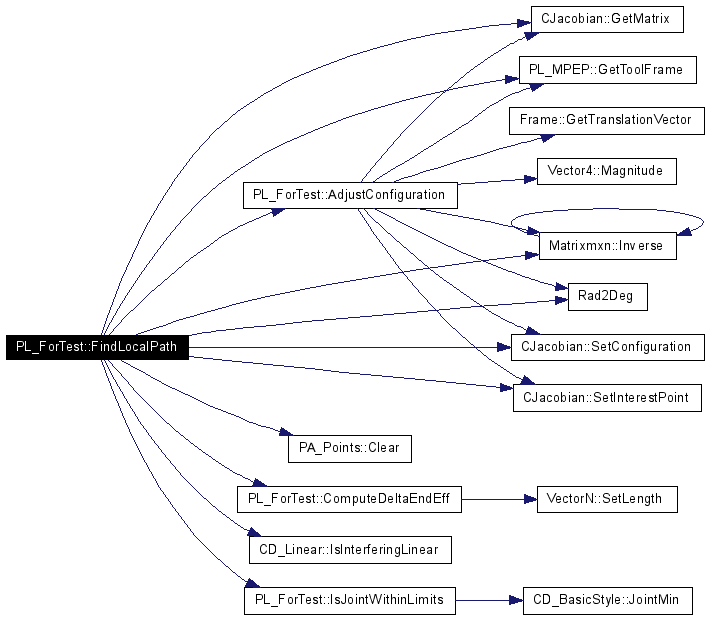 |
|
||||||||||||||||||||
|
Definition at line 521 of file PL_ForTest.cpp. References PA_Points::AppendPoint(), PL_Boolean_Output::GetPath(), m_pLocalPlanner, Jacobian_TrajPlanner::Plan(), PL_MPEP::poses, Jacobian_TrajPlanner::SetStartConfig(), Jacobian_TrajPlanner::SetTrajectory(), TrajPlanner::SetUseGoalConfig(), TrajPlanner::SetUsingOrientation(), and PA_Points::Size(). Here is the call graph for this function: 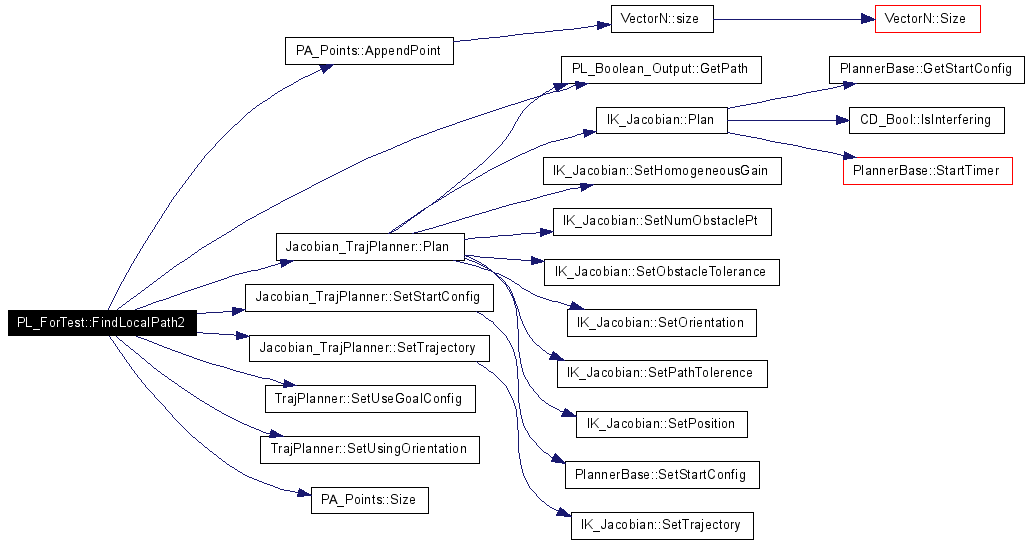 |
|
|
Reimplemented from PL_MPEP. Definition at line 317 of file PL_ForTest.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::JointMin(), and m_nDof. Referenced by Extend_Node_Self_Motion_Graph_Jacobian(), and FindLocalPath(). Here is the call graph for this function:  |
|
|
Definition at line 567 of file PL_ForTest.cpp. References Log(), m_nSMGNodes, m_nSMGraphs, PL_Boolean_Output::path, PA_Points::Size(), and PL_MPEP::vertices. Here is the call graph for this function: 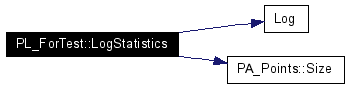 |
|
|
Reimplemented from PL_MPEP. Definition at line 66 of file PL_ForTest.cpp. References PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, ERROR_OK, PlannerBase::GetStartConfig(), CD_Bool::IsInterfering(), m_frEndEffector, m_nDof, m_pJacobian, m_pRobot, PL_Boolean_Output::path, CJacobian::SetConfiguration(), CJacobian::SetInterestPoint(), PlannerBase::startConfig, PL_MPEP::usingGoalConfig, and PL_MPEP::usingStartConfig. Here is the call graph for this function: 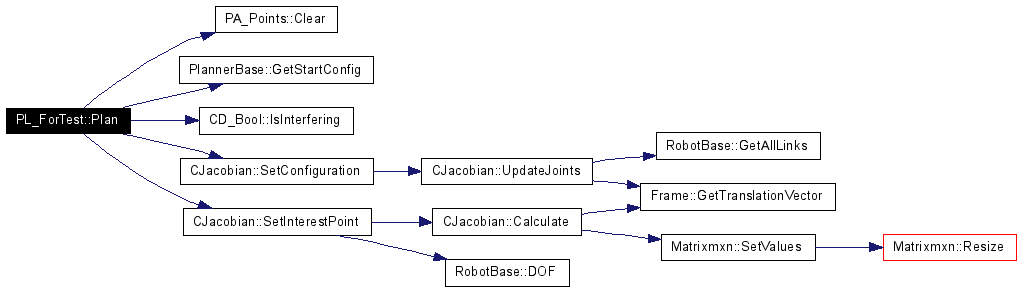 |
|
|
Definition at line 541 of file PL_ForTest.cpp. References SMGraph::Clear(), Pose_Node::graph, PlannerBase::guid, Semaphore::Lock(), PL_MPEP::tree, and Semaphore::Unlock(). Here is the call graph for this function: 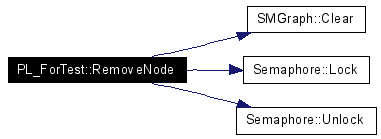 |
|
|
Definition at line 561 of file PL_ForTest.cpp. References m_nSMGNodes, and m_nSMGraphs. |
|
|
Reimplemented from PL_MPEP. Definition at line 42 of file PL_ForTest.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DeactivateFrames(), CD_BasicStyle::DOF(), CD_BasicStyle::GetFrameManager(), FrameManager::GetFrameRef(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), Matrix4x4::Identity(), m_frEndEffector, m_nDof, m_nToolFrame, m_pJacobian, m_pLocalPlanner, m_pRobot, Jacobian_TrajPlanner::SetCollisionDetector(), and PL_MPEP::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function: 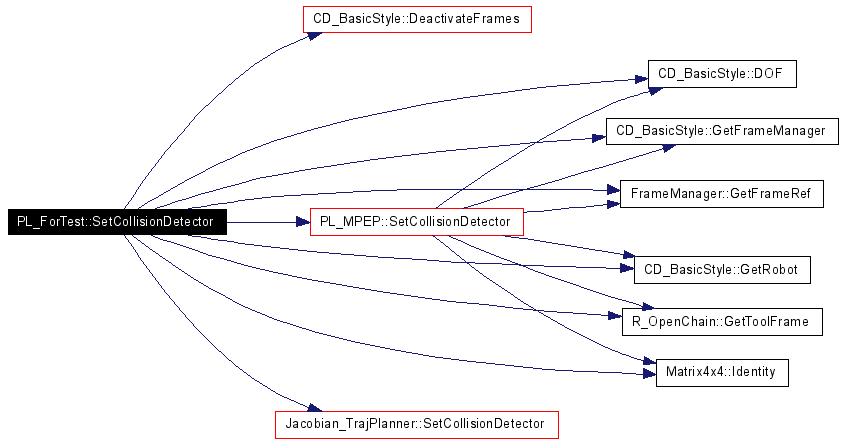 |
|
|
Definition at line 24 of file PL_ForTest.h. References m_bUseJacobianSMGExploration. |
|
|
Definition at line 27 of file PL_ForTest.h. References m_bUseObstacleAvoidLP. |
|
|
Definition at line 25 of file PL_ForTest.h. References m_nSMGStepSize. |
|
|
Definition at line 23 of file PL_ForTest.h. References m_nStepAhead. |
|
|
Definition at line 26 of file PL_ForTest.h. References m_bUseBacktracking. |
|
|
Definition at line 55 of file PL_ForTest.h. Referenced by Establish_Self_Motion_Graph(), PL_ForTest(), and SetUseBacktracking(). |
|
|
Definition at line 54 of file PL_ForTest.h. Referenced by PL_ForTest(), and SetMethodUsed(). |
|
|
Definition at line 56 of file PL_ForTest.h. Referenced by PL_ForTest(), and SetObstacleAvoidLP(). |
|
|
Reimplemented from PL_MPEP. Definition at line 48 of file PL_ForTest.h. Referenced by AdjustConfiguration(), FindLocalPath(), Plan(), and SetCollisionDetector(). |
|
|
Reimplemented from PL_MPEP. Definition at line 46 of file PL_ForTest.h. Referenced by AdjustConfiguration(), Extend_Node_Self_Motion_Graph_Jacobian(), FindLocalPath(), IsJointWithinLimits(), Plan(), and SetCollisionDetector(). |
|
|
Definition at line 60 of file PL_ForTest.h. Referenced by LogStatistics(), PL_ForTest(), and ResetStatistics(). |
|
|
Definition at line 61 of file PL_ForTest.h. Referenced by Establish_Self_Motion_Graph(), LogStatistics(), PL_ForTest(), and ResetStatistics(). |
|
|
Definition at line 57 of file PL_ForTest.h. Referenced by Extend_Node_Self_Motion_Graph_Jacobian(), PL_ForTest(), and SetSMGStepSize(). |
|
|
Definition at line 53 of file PL_ForTest.h. Referenced by PL_ForTest(), and SetStepAhead(). |
|
|
Reimplemented from PL_MPEP. Definition at line 47 of file PL_ForTest.h. Referenced by SetCollisionDetector(). |
|
|
Reimplemented from PL_MPEP. Definition at line 49 of file PL_ForTest.h. Referenced by AdjustConfiguration(), Extend_Node_Self_Motion_Graph_Jacobian(), FindLocalPath(), PL_ForTest(), Plan(), SetCollisionDetector(), and ~PL_ForTest(). |
|
|
Definition at line 50 of file PL_ForTest.h. Referenced by FindLocalPath2(), PL_ForTest(), SetCollisionDetector(), and ~PL_ForTest(). |
|
|
Reimplemented from PL_MPEP. Definition at line 45 of file PL_ForTest.h. Referenced by Plan(), and SetCollisionDetector(). |
 1.4.6-NO
1.4.6-NO